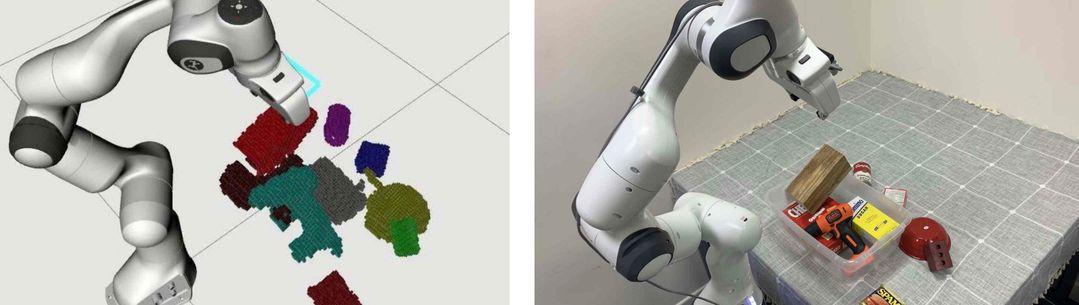
A real-time robotics application where a robot arm precisely and orderly disassembles complicated piles of objects, using only on-board RGB-D vision.
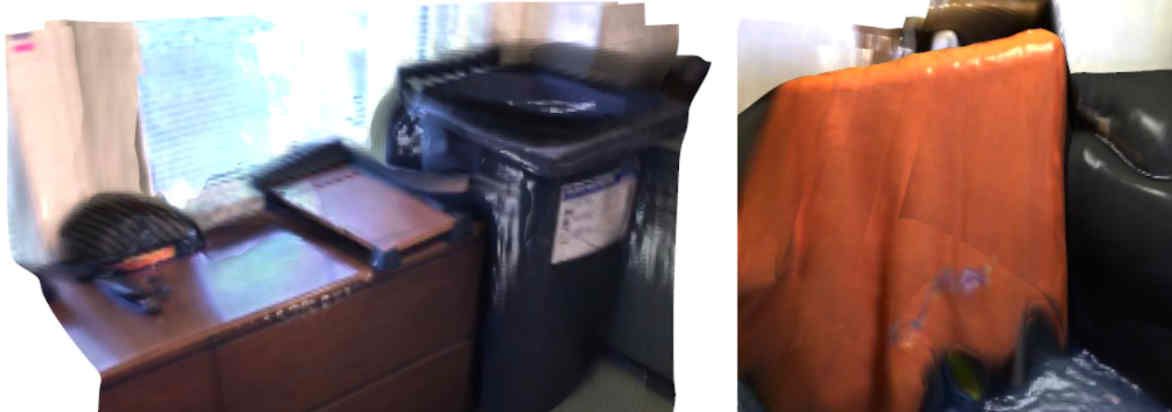
Robots and other smart devices need efficient objectbased scene representations from their on-board vision systems to reason about contact, physics and occlusion. Recognized precise object models will play an important role alongside non-parametric reconstructions of unrecognized structures. We present a system which can estimate the accurate poses of multiple known objects in contact and occlusion from real-time, embodied multi-view vision. Our approach makes 3D object pose proposals from single RGBD views, accumulates pose estimates and non-parametric occupancy information from multiple views as the camera moves, and performs joint optimization to estimate consistent, non-intersecting poses for multiple objects in contact. We verify the accuracy and robustness of our approach experimentally on 2 object datasets: YCB-Video, and our own challenging Cluttered YCB-Video. We demonstrate a real-time robotics application where a robot arm precisely and orderly disassembles complicated piles of objects, using only on-board RGB-D vision.
Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton and Andrew J. Davison. MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric Fusion. CVPR2020
The MoreFusion software is available through the link on the right and is free to be used for non-commercial purposes. Full terms and conditions which govern its use are detailed here.
News 2018-2024














Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk