
Learning and control for medical robotics
Miniaturised flexible robotics are essential for robot-assisted medical healthcare and treatment, especially for minimally invasive surgery (MIS), as it empowers more flexible access to restricted anatomic interventions.
The forefront developments are reshaping the future of medical robots with more advanced intelligent control strategies incorporated. Yet, there are several practical open challenges that are needed to be tackled, in particular:
- miniature surgical robotic design
- accurate modelling and control
- high-level intelligence for robotics
- autonomy for complex tasks
Our research team therefore focused on investigating new approaches to tackle these challenges, such as:
- kinematic parameter optimisation with controversy constraints
- data-driven modelling and control subject to nonlinearities and uncertainties
- expert skills transfer through robot learning
- open-source tool that allows users to improve the accuracy of robot kinematic modelling
 1) Miniature surgical robotic design
1) Miniature surgical robotic design
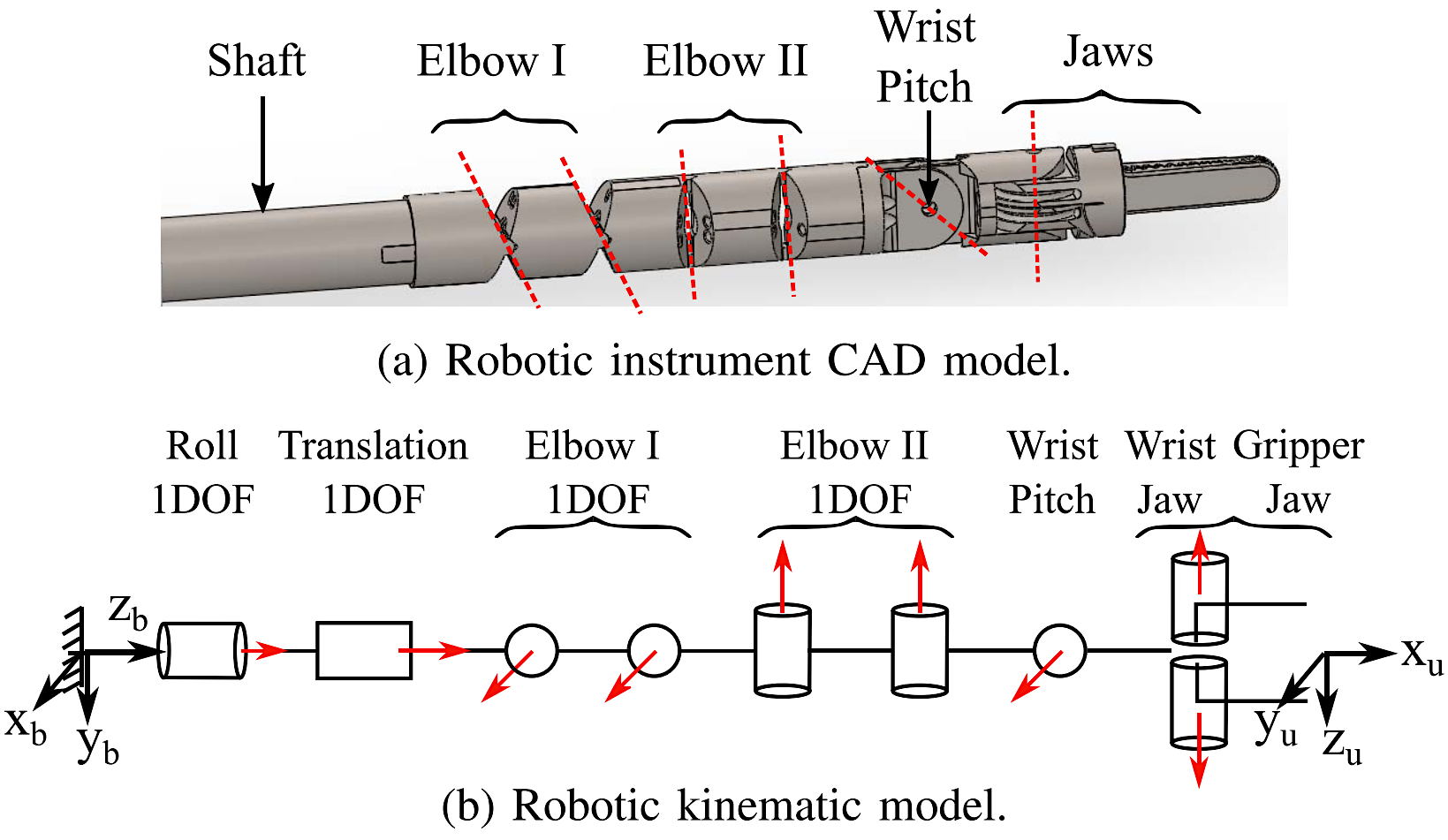
The miniaturisation design and integration of surgical manipulators are essential. Tendon-driven schemes, therefore, are extensively adopted in this situation due to their flexible, lightweight, and compact actuation and power transmission ability. Yet, how to optimise the design of the robotic structures with multiple actual demands is of great importance but extremely challenging.
Our research team proposed a potential approach for designing a miniaturised tendon-driven surgical instrument under necessary restraints based on dexterous workspace determination. This approach aims to address the contradictory surgical operation needs of miniaturisation and the capability of manipulating with a large dexterous workspace.

- Xin Zhi, Weibang Bai and Eric M. Yeatman, "Kinematic Parameter Optimization of a Miniaturized Surgical Instrument Based on Dexterous Workspace Determination", 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), September 2021.
2) Accurate modelling and control
a) Task-based LSTM kinematic modelling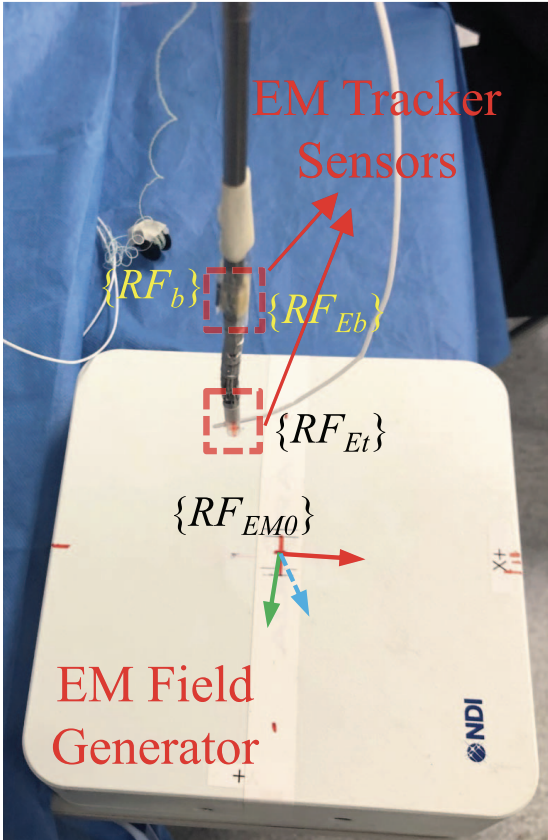
The widely adopted tendon-driven flexible surgical robots are normally suffering from the inaccurate modelling and imprecise motion control problems due to:
- the intrinsic nonlinearities and uncertainties of tendon transmission and
- the difficulty of onboard sensor integration
On the other hand, Learning-based approaches, such as Long Short-Time Memory (LSTM), are experimental data-driven with uncertainties modelled empirically, which can be incorporated to improve the inevitable issues.’
Our research team thus proposed a LSTM-based kinematic modelling approach with task-based data for a flexible tendon-driven surgical robot, aiming to improve the modelling and control accuracy. The real experiments demonstrated the effectiveness and superiority of the proposed learning-based method when completing path following tasks especially compared to the traditional modelling approach.

- Weibang Bai, Francesco Cursi, Xiaotong Guo, Baoru Huang, Benny Lo, Guang-Zhong Yang and Eric Yeatman, "Task-Based LSTM Kinematic Modelling for a Tendon-Driven Flexible Surgical Robot", IEEE Transactions on Medical Robotics and Bionics, 2576-3202, November 2021.
b) A novel control strategy for task accuracy enhancement
To tackle the challenges of modelling surgical robots, such as
- the high nonlinearities in the system and
- lack of effective motion control strategies and proper modelling caused by the high complexity of the structures,
our research team proposed a control strategy based on Hierarchical Quadratic Programming (HQP) with additional Sequential Quadratic Programming (SQP) for uncertainty minimisation for a macro-micro manipulator, which is capable of exploiting model uncertainties in order to improve autonomous task execution.
Moreover, our research team also
- employed and compared Bayesian Neural Networks (BNN) and Evidential Neural Networks (EvNN) for robot kinematic modelling, and
- integrated the learnt model of a surgical robotic tool with a KUKA serial-link manipulator in macro-micro manipulator structure.
Simulation and real world experiments on different autonomous path tracking tasks showed that the model uncertainty highly affects the control performances and proved the effectiveness of the proposed controller in improving task execution.
- Francesco Cursi, Weibang Bai, Eric. M. Yeatman and Petar Kormushev, "Task Accuracy Enhancement for a Surgical Macro-micro Manipulator with Probabilistic Neural Networks and Uncertainty Minimization”, IEEE Transaction on Automated Sciences and Engineering (T-ASE), November 2022.
3) High-level intelligence and autonomy for complex tasks
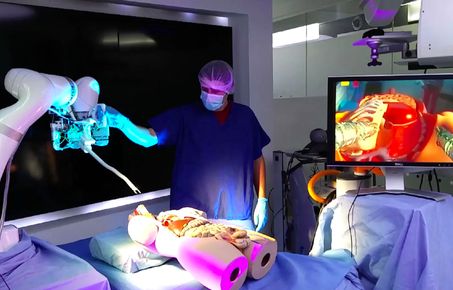
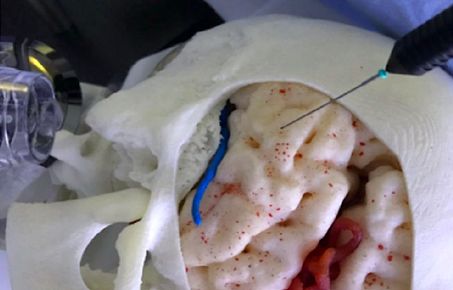
In order to achieve more intelligent control and higher autonomy for medical robots, our research team applied learning from demonstration to transfer operator manipulation skills to robots.
In practice, it is important to cater for limited data and imperfect human demonstrations, as well as underlying safety constraints. Our research team thus approach those difficulties through a constrained-space optimisation and reinforcement learning scheme, and then manage complex tasks.
 Through interactions within the constrained space, the reinforcement learning agent is trained to optimise the manipulation skills according to a defined reward function. After learning, the optimal policy is derived from the well-trained reinforcement learning agent, which is then implemented to guide the robot to conduct tasks that are similar to the experts’ demonstrations.
Through interactions within the constrained space, the reinforcement learning agent is trained to optimise the manipulation skills according to a defined reward function. After learning, the optimal policy is derived from the well-trained reinforcement learning agent, which is then implemented to guide the robot to conduct tasks that are similar to the experts’ demonstrations.
The effectiveness of the proposed method is verified with a robotic suturing task, demonstrating that the learned policy outperformed the experts’ demonstrations in terms of the smoothness of the joint motion and end-effector trajectories, as well as the overall task completion time.
- Weibang Bai, Ningshan Zhang, Baoru Huang, Ziwei Wang, Francesco Cursi, Ya-Yen Tsai, Bo Xiao and Eric Yeatman, "Dual-arm Coordinated Manipulation for Object Twisting with Human Intelligence", 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), January 2022.
4) Kalibrot and GlobDesOpt - A collection of open-source packages for robot modelling design
In minimally invasive surgery (MIS), having accurate kinematic robotic models are essential for effective control of surgical robot as there are very few (or even no) sensors can be used to compensate for the modelling errors and surgical environments are rarely structured, due to organs being very soft and deformable, and unpredictable.
In order to reduce patient’s traumas and ensure high dexterity and maneuverability of the robotic system, there has been a large shift towards more and more miniaturised and dexterous robots. However, designing surgical robots is a very hard challenge because:
- it has to comply with the imposed requirements of achieving high dexterity and flexibility, while keeping dimensions small.
- surgical robots are generally used in dual-arm configuration, meaning two arms are simultaneously employed and controlled. This situation leads to even higher complexity in properly deigning the robotic system as various considerations about different interactions between the two arms should be made.
- once the robotic system is theoretically designed, manufacturing inaccuracies or offsets in the assembly lead to discrepancies between the actual robot behaviour and the modelled one.
Although there are exist approaches to improve robot kinematic modelling, there is no open-source tool that allows users to achieve this task easily. Most approaches are specific to either companies or research groups, and finding easy-to-use toolboxes is very hard. Our Theme 2 research team therefore proposed a collection of open-source packages for robot modelling design, with the hope to contribute to the robotics community in MIS.
Kalibrot and GlobDesOpt are both open-source Matlab packages, aiming to facilitate the robotics community in easily designing robotic structures for any required purpose and calibrating their design based on the measurements from the actual robotic system. Matlab has been used since it is a very user-friendly software that provides nice visualisations and analysis of the results.
- Kalibrot is designed to simplify robot calibration and easily assess the calibration results. Beside computing the optimal parameters, Kalibrot provides a visualisation layer showing the values of the calibrated parameters, what parameters can be identified, and the calibrated robotic structure.
- GlobDesOpt is a simple-to-use open-source optimisation framework for robot design based on global optimisation methods. The framework allows selecting various design parameters and optimising for both single and dual-arm robots.
 Currently, the packages focus on serial-link robotic structures, but they can be easily generalised to more complex structures like continuum robots which are becoming more popular in the surgical robotics filed.
Currently, the packages focus on serial-link robotic structures, but they can be easily generalised to more complex structures like continuum robots which are becoming more popular in the surgical robotics filed.
The packages provide the users with large flexibility as different robotic models can be integrated. Moreover, the user is also left with the choice of different solvers to use, so as to more appropriately customise the use to their needs and have a larger choice of optimal solutions.
We believe that providing open-source packages allows users in the robotics community to more easily achieve their goals with respect to robot design and calibration, without the need to spend unnecessary time in developing their own frameworks and toolboxes.
- Francesco Cursi, WeiBang Bai, Eric Yeatman and Petar Kormushev, "GlobDesOpt: A Global Optimization Framework for Optimal Robot Manipulator Design," IEEE Access, 10, 5012-5023, January 2022. [*Hamlyn News: Publication Announcement]
- Francesco Cursi, Weibang Bai and Petar Kormushev, "Kalibrot: A Simple-To-Use Matlab Package for Robot Kinematic Calibration", 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), December 2021.
Theme 2 Highlights
Research Outcomes
- To know more about our Research Outcomes (Key Findings, Research Databases and Models, Research Tools and Methods, Collaboration, Software and Technical Products, Intellectual Property and Engagement Activities), please visit UKRI - Micro-Robotics for Surgery (EP/P012779/1) website.
Programme Grant Theme 1, 2, 3



Contact Us
The Hamlyn Centre
Bessemer Building
South Kensington Campus
Imperial College
London, SW7 2AZ
Map location