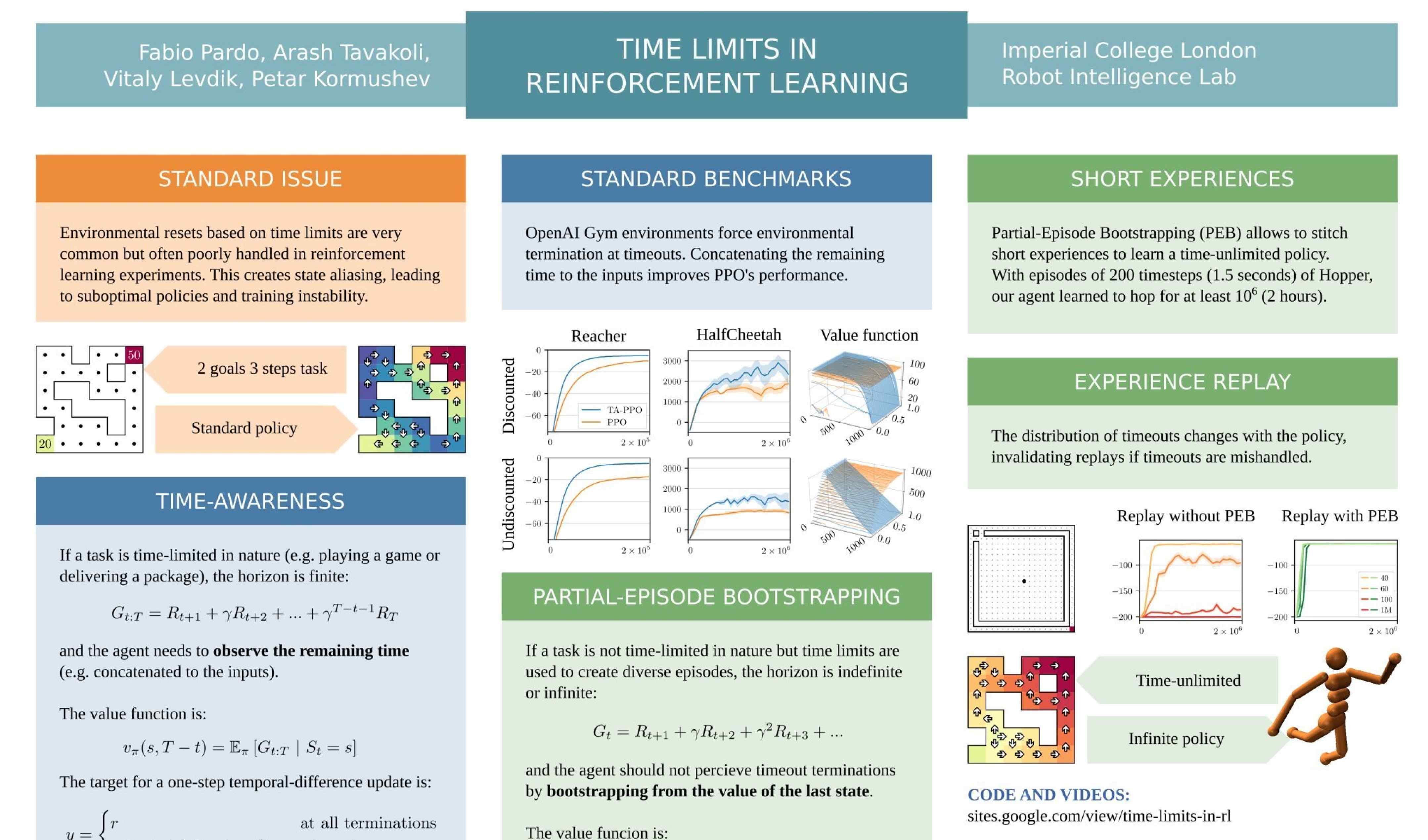
Fabio Pardo @ ICML 2018, “Time Limits in Reinforcement Learning”
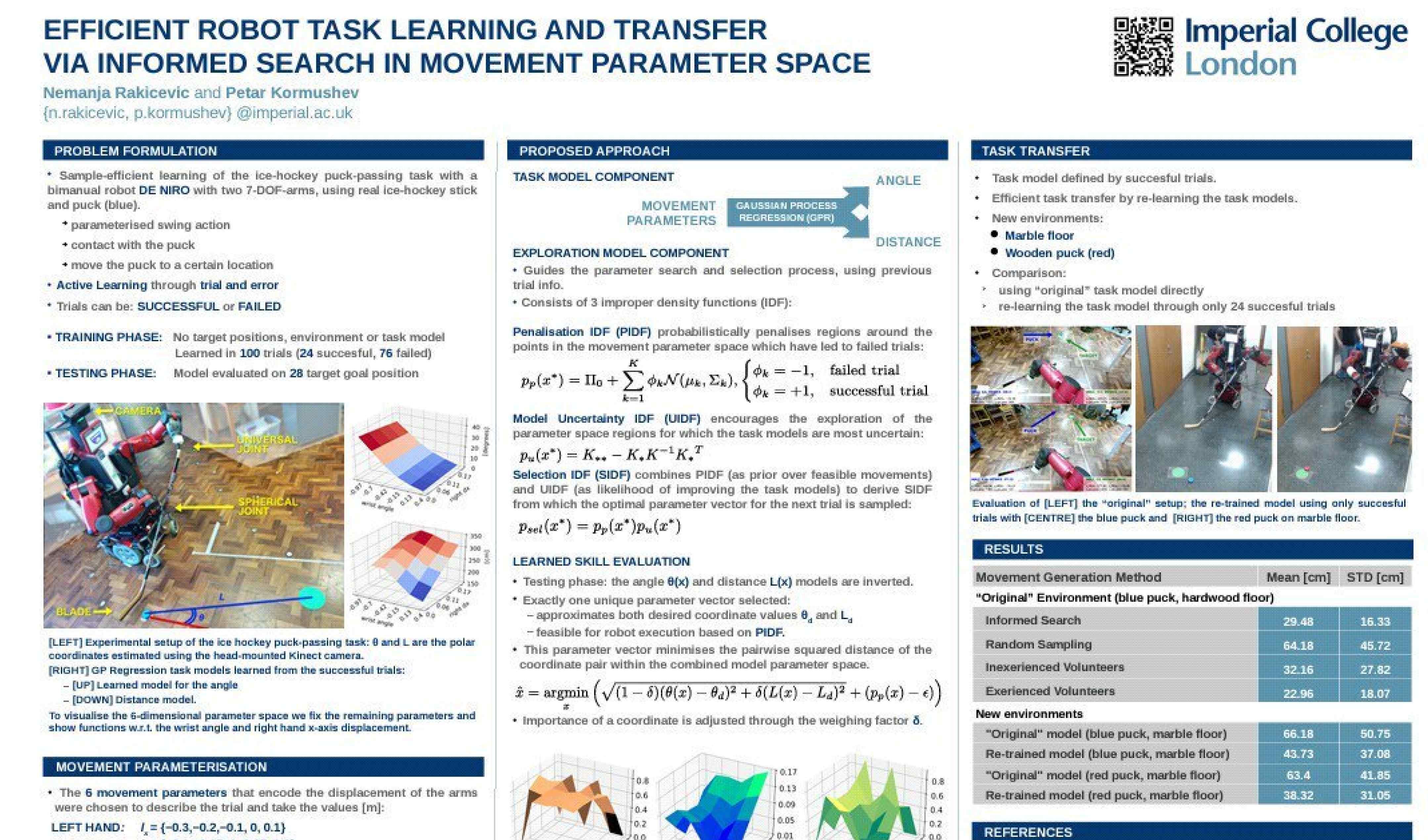
Nemanja Rakicevic @ NIPS 2017, "Efficient Robot Task Learning and Transfer via Informed Search in Movement Parameter Space"
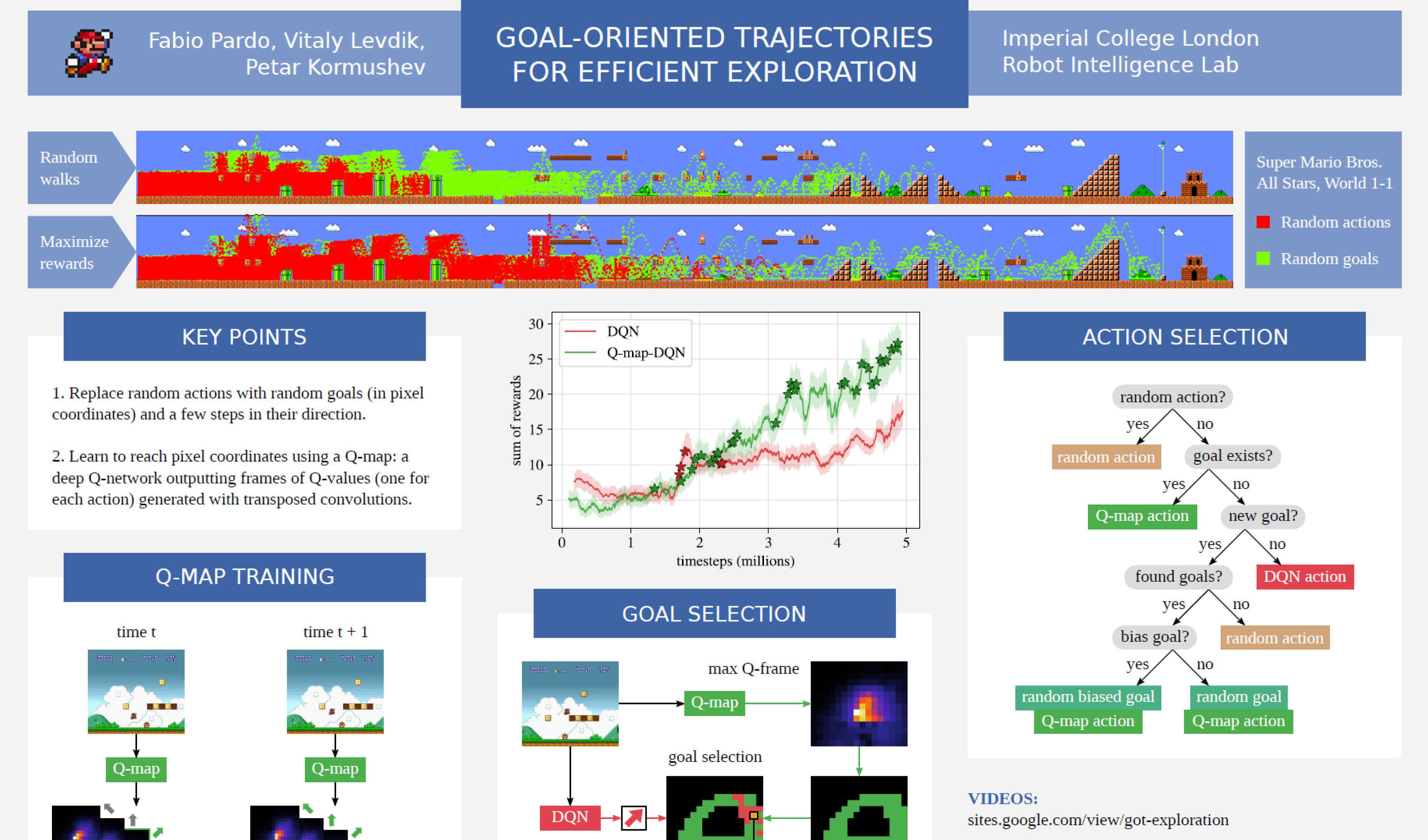
Fabio Pardo @ ICML 2018, “Goal-oriented trajectories for efficient exploration”
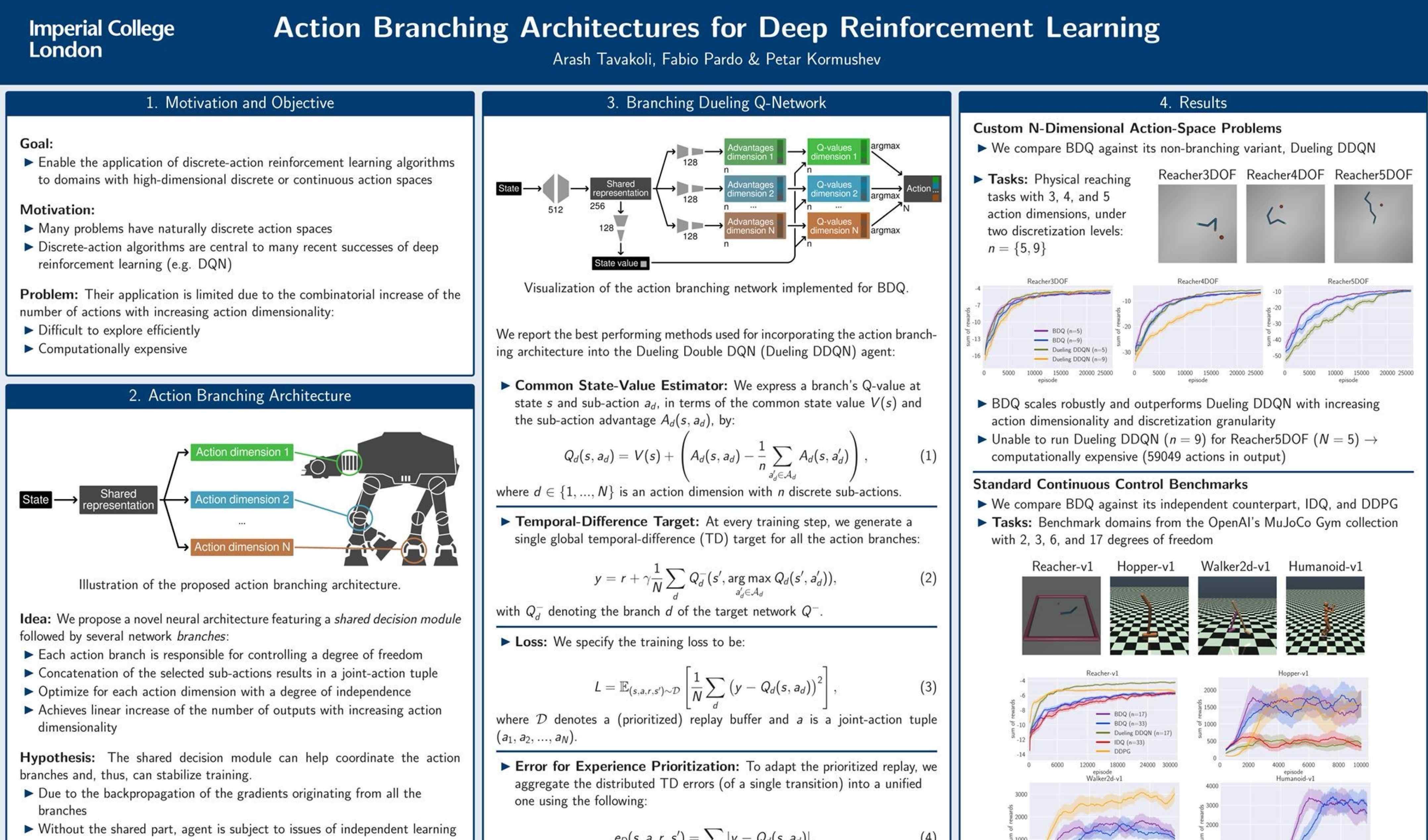
Arash Tavakoli @ NIPS 2017, "Action Branching Architectures for Deep Reinforcement Learning”
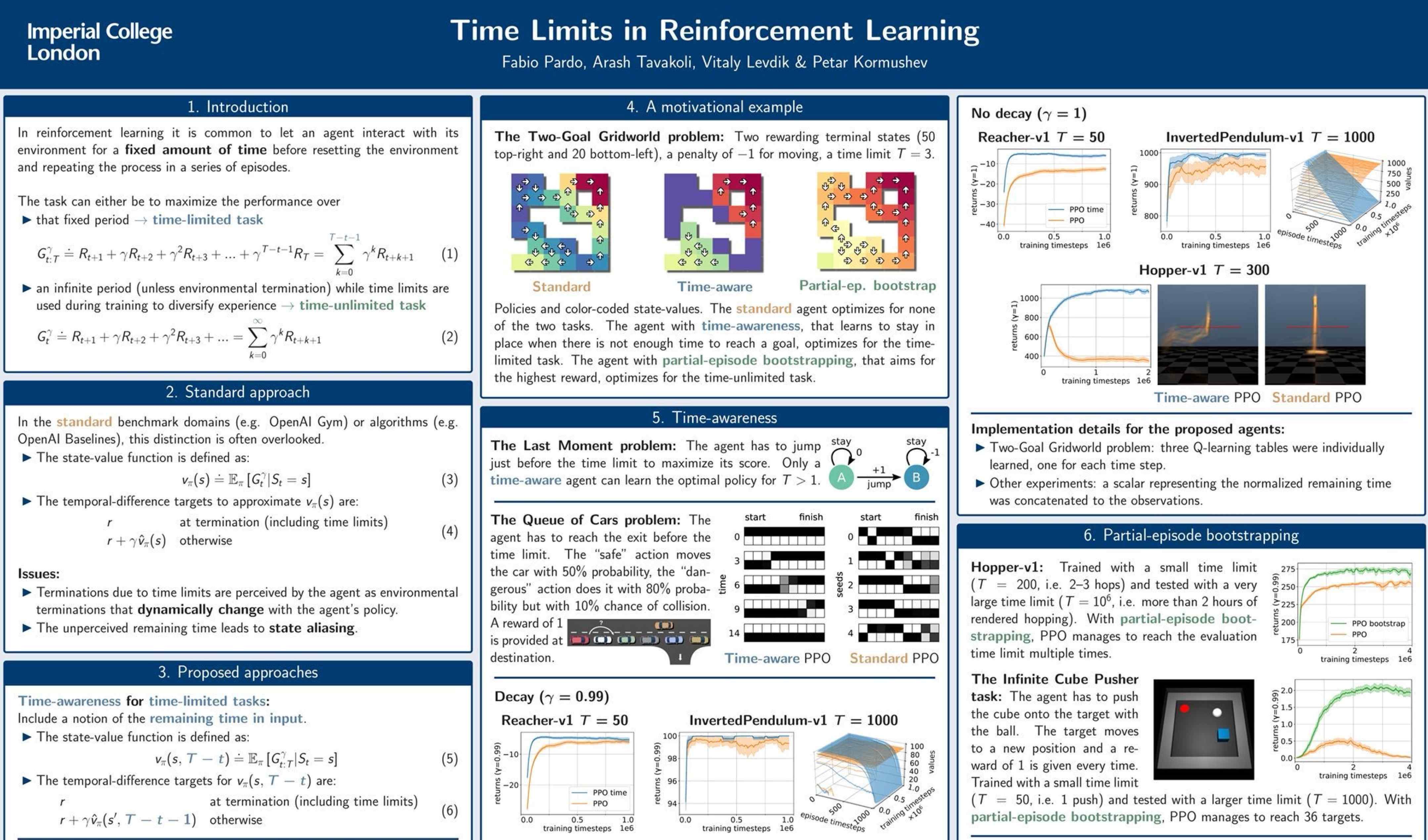
Fabio Pardo @ NIPS 2017, “Time Limits in Reinforcement Learning”
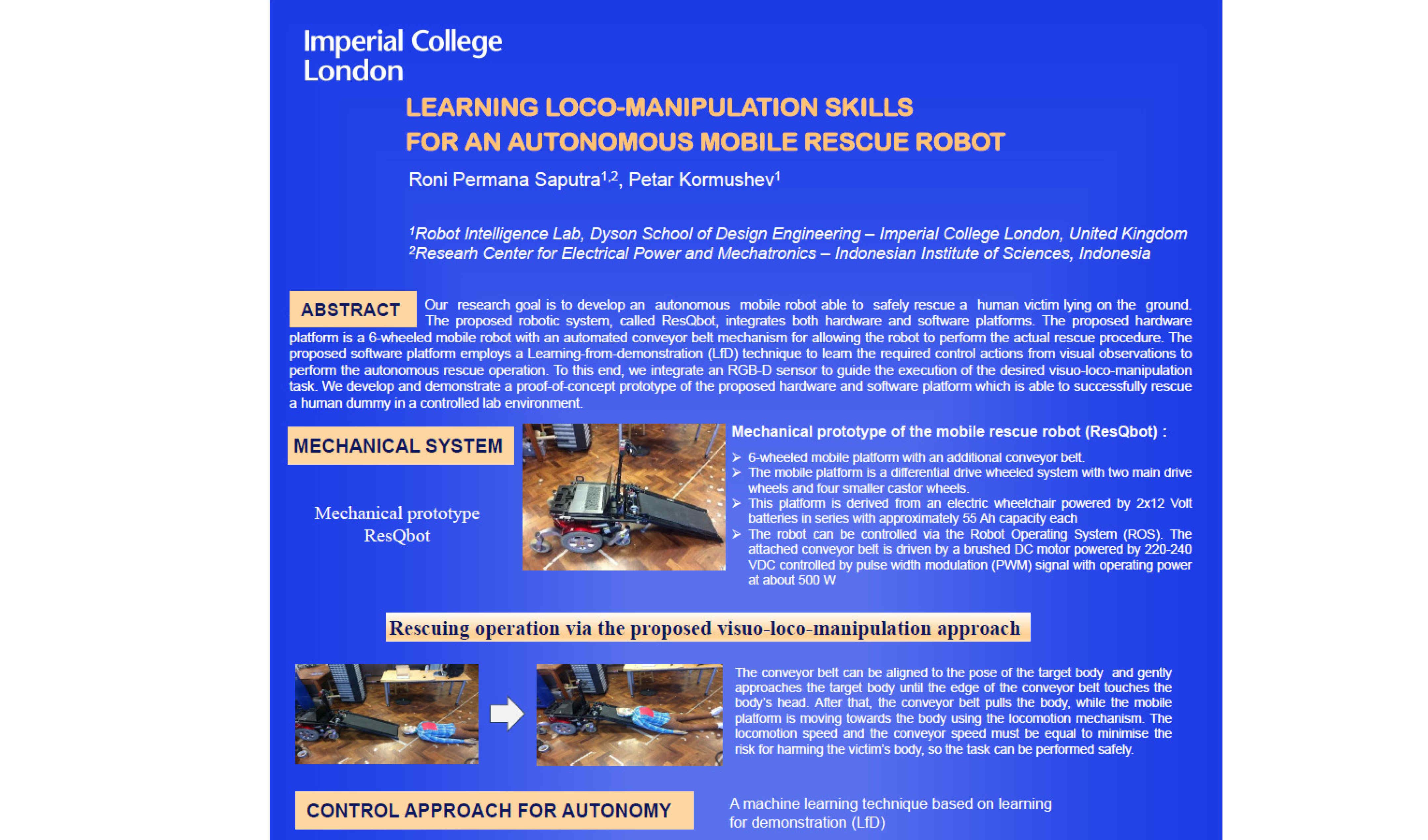
Roni Saputra @ UK Robot Manipulation Workshop, 2017

Contact us
Senior Lecturer (Associate Professor)
Dyson School of Design Engineering
E-mail: p.kormushev@imperial.ac.uk
Address: 25 Exhibition Road, South Kensington, London, SW7 2DB

