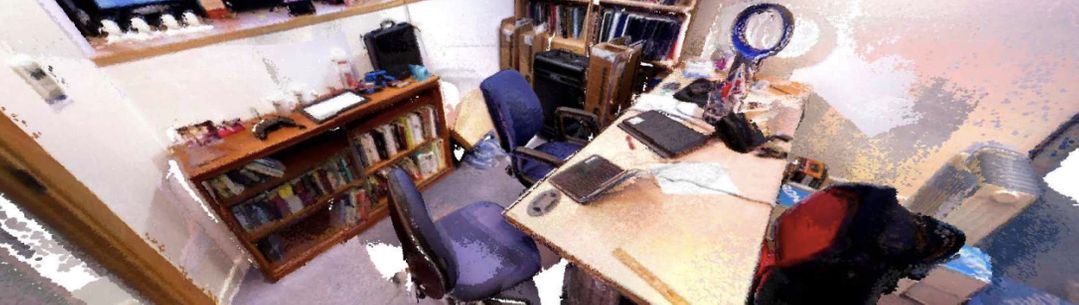
A real-time map-centric approach which constructs dense, consistent room-scale maps by detecting and correcting for loop closures
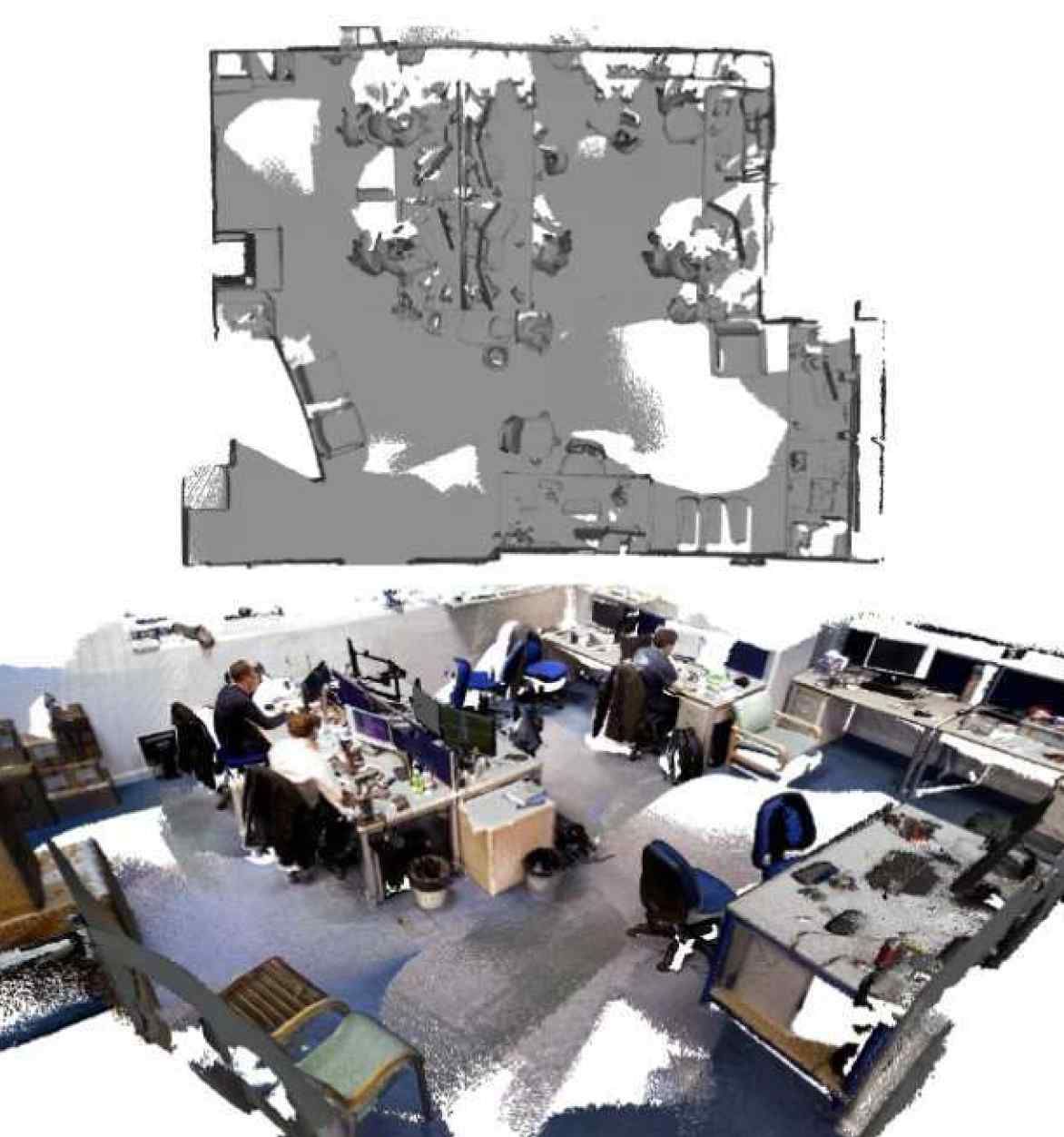
We present a novel approach to real-time dense visual SLAM. Our system is capable of capturing comprehensive dense globally consistent surfel-based maps of room scale environments and beyond explored using an RGB-D camera in an incremental online fashion, without pose graph optimisation or any post-processing steps. This is accomplished by using dense frame-tomodel camera tracking and windowed surfel-based fusion coupled with frequent model refinement through non-rigid surface deformations. Our approach applies local model-to-model surface loop closure optimisations as often as possible to stay close to the mode of the map distribution, while utilising global loop closure to recover from arbitrary drift and maintain global consistency. In the spirit of improving map quality as well as tracking accuracy and robustness, we furthermore explore a novel approach to real-time discrete light source detection. This technique is capable of detecting numerous light sources in indoor environments in real-time as a user handheld camera explores the scene. Absolutely no prior information about the scene or number of light sources is required. By making a small set of simple assumptions about the appearance properties of the scene our method can incrementally estimate both the quantity and location of multiple light sources in the environment in an online fashion. Our results demonstrate that our technique functions well in many different environments and lighting configurations. We show that this enables (a) more realistic augmented reality (AR) rendering; (b) a richer understanding of the scene beyond pure geometry and; (c) more accurate and robust photometric tracking.
T. Whelan, S. Leutenegger, R. F. Salas-Moreno, B. Glocker and A. J. Davison. ElasticFusion: Dense SLAM Without A Pose Graph. RSS, 2015
The ElasticFusion software is available through the link on the right and is free to be used for non-commercial purposes. Full terms and conditions which govern its use are detailed here.
News 2018-2024












Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk