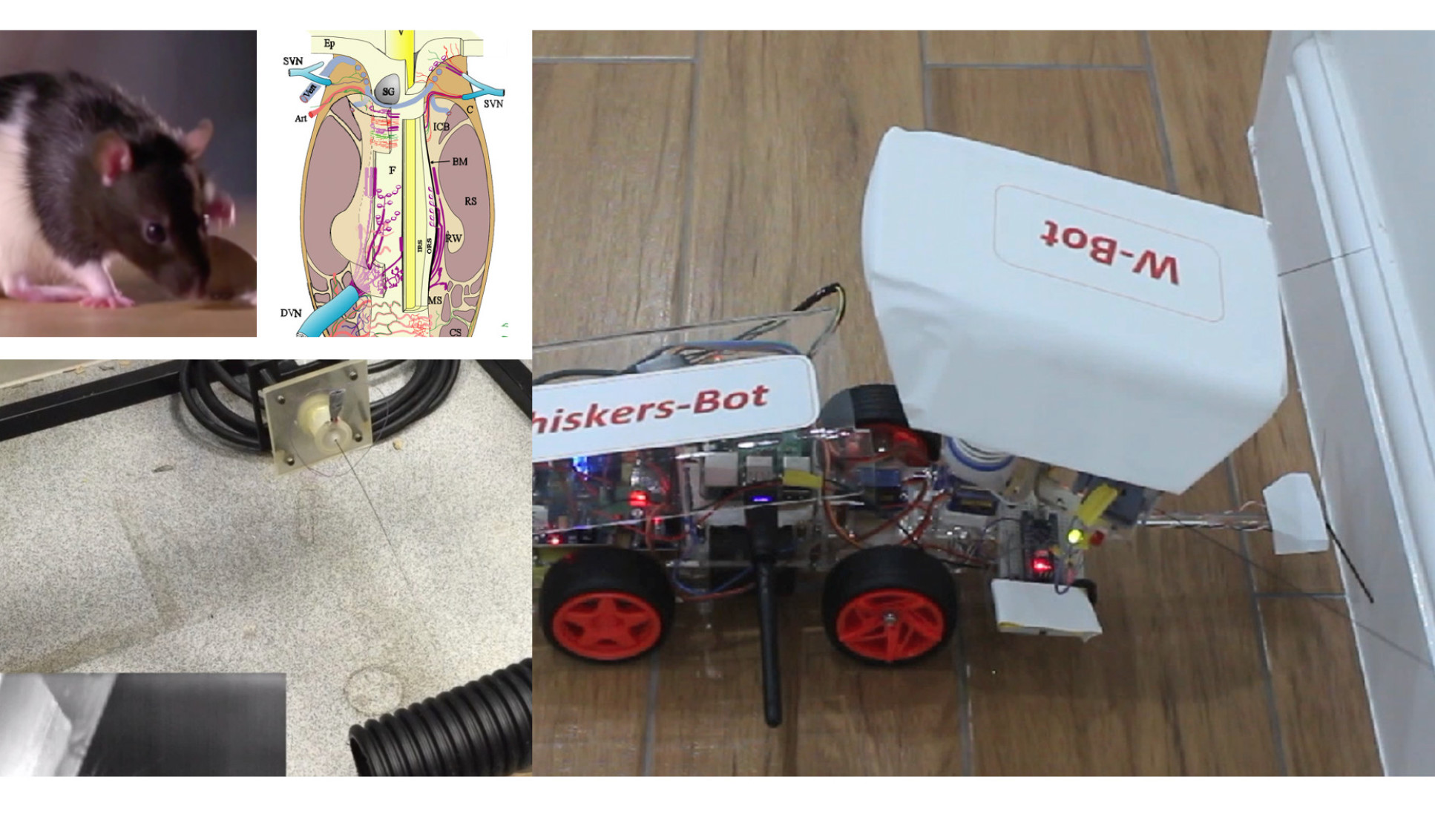
Nocturnal mammals such as rats heavily depend on whisker based tactile perception to find their way through burrows and to identify objects. There is diversity in the whiskers in terms of the physical structure and nervous innervation. We have taken a soft robotics approach to understand how the organization and variable stiffness in the whisker follicle can help to sharpen task specific information in objects. For instance, if the objective is to know the shape of an object, there is no need to have high resolution texture information and vis versa. Our soft robotics studies show that the structural dynamics in the whisker follicle can be conditioned to favor different sensors placed inside the follicle to represent the deep vibrissal and superficial vibrissal nerves. Here are some of our publications in this area:
- Zhenhua Yu, S. M. Hadi Sadati, Shehara Perera, Helmut Hauser, Peter R. N. Childs, and Thrishantha Nanayakkara, "Tapered Whisker Reservoir Computing for Real-time Terrain Identification-Based Navigation", Nature Scientific Reports, 2023. [PDF]
- Helmut Hauser, Thrishantha Nanayakkara, and Fulvio Forni, "Leveraging Morphological Computation for Controlling Soft Robots", IEEE Robotics and Automation Magazine, 2023. [PDF]
- Yu, Zhenhua, Uswatta Liyanage Shehara Perera, Helmut Hauser, Peter RN Childs, and Thrishantha Nanayakkara. "A Tapered Whisker-Based Physical Reservoir Computing System for Mobile Robot Terrain Identification in Unstructured Environments." IEEE Robotics and Automation Letters (2022). [PDF]
- Yu, Zhenhua, SM Hadi Sadati, Helmut Hauser, Peter RN Childs, and Thrishantha Nanayakkara. "A Semi-Supervised Reservoir Computing System Based on Tapered Whisker for Mobile Robot Terrain Identification and Roughness Estimation." IEEE Robotics and Automation Letters 7, no. 2 (2022): 5655-5662. [PDF]
- Wegiriya, H., Herzig, N., Abad, S. A., Sadati, S. H., & Nanayakkara, T. (2019). A Stiffness Controllable Multimodal Whisker Sensor Follicle for Texture Comparison. IEEE Sensors Journal, 20(5), 2320-2328. PDF
- Hasitha Wegiriya, Nantachai Sornkarn, Harry Bedford and Thrishantha Nanayakkara, “A Biologically Inspired Multimodal Whisker Follicle” 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC2016), PDF
Contact the PI
Professor Thrishantha Nanayakkara
RCS1 M229, Dyson Building
25 Exhibition Road
South Kensington, SW7 2DB
Email: t.nanayakkara@imperial.ac.uk