Kinematic-free robot control (a.k.a. model-free control) is an alternative approach to controlling robots without using explicitly a kinematic mathematical model of the robot. Such approaches work without the need of forward or inverse kinematic calculations, and are suitable for applications where either no such simple mathematical models exist, or they do but for some reason we do not wish to use them (e.g. fault recovery, increased design freedom, etc.).
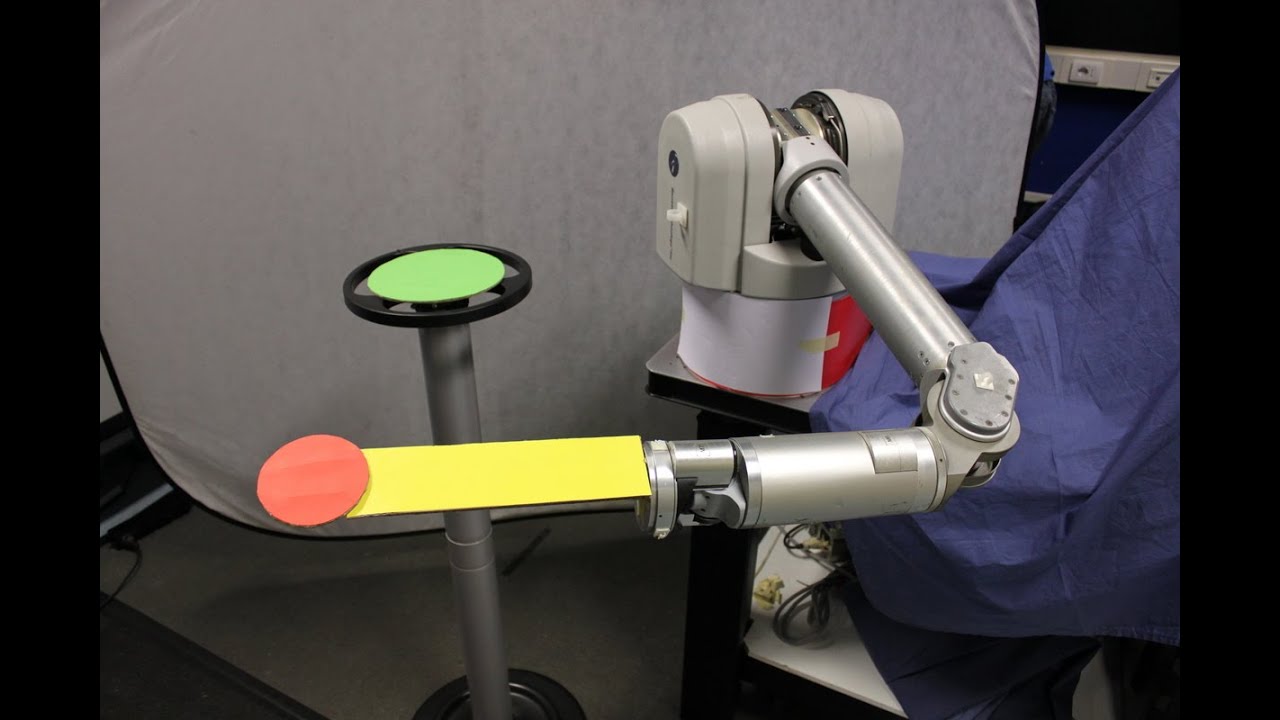
Encoderless Position Control of a Two-Link Robot Manipulator
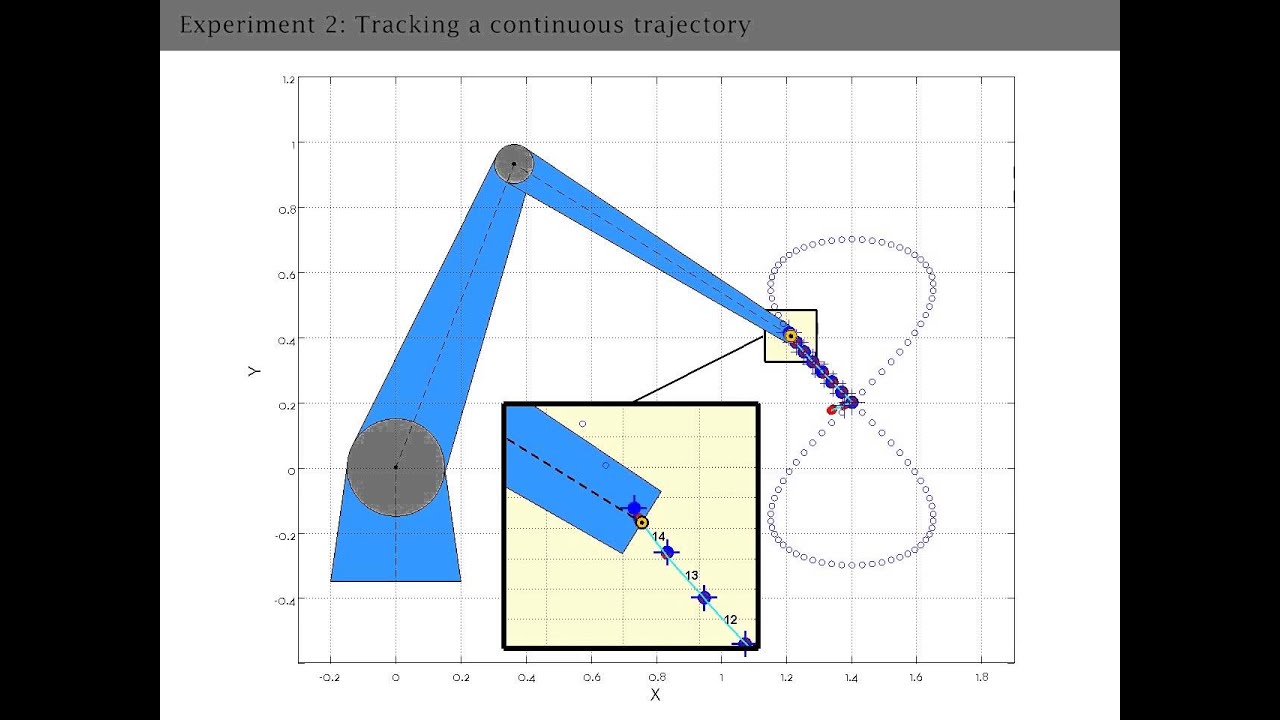
Kinematic-free Position Control of a Robot Arm
Publications
- Petar Kormushev, Yiannis Demiris, Darwin G. Caldwell, "Kinematic-free Position Control of a 2-DOF Planar Robot Arm", In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS 2015), Hamburg, Germany, 2015.
- Petar Kormushev, Yiannis Demiris, Darwin G. Caldwell, "Encoderless Position Control of a Two-Link Robot Manipulator", In Proc. IEEE Intl Conf. on Robotics and Automation (ICRA 2015), Seattle, USA, 2015. (Best Paper Award finalist)

Contact us
Senior Lecturer (Associate Professor)
Dyson School of Design Engineering
E-mail: p.kormushev@imperial.ac.uk
Address: 25 Exhibition Road, South Kensington, London, SW7 2DB

