We do research on robot manipulation driven by state-of-the-art machine learning methods. Over the last decade the research on robot learning and human-robot skill transfer has progressed significantly. Our research is focused on novel machine learning approaches that combine learning by imitation with reinforcement learning to achieve higher levels of dexterity in manipulating various objects, including rigid and soft objects, single- and dual-arm manipulation, whole-body manipulation, visuospatial skill learning, etc.
We have several robots that we use to study manipulation:
FRANKA EMIKA Panda - a collaborative robot arm.
ResQbot - an autonomous casualty extraction robot.
Robot DE NIRO - Design Engineering's Natural Interaction Robot.
DE VITO Exoskeleton - Design Engineering's Virtual Interface for Tele-Operation.
Air Hockey Robot - a cable-driven robot designed to play air hockey.
Lab members researching robot manipulation: Digby Chappell, Francesco Cursi, Roni Permana Saputra
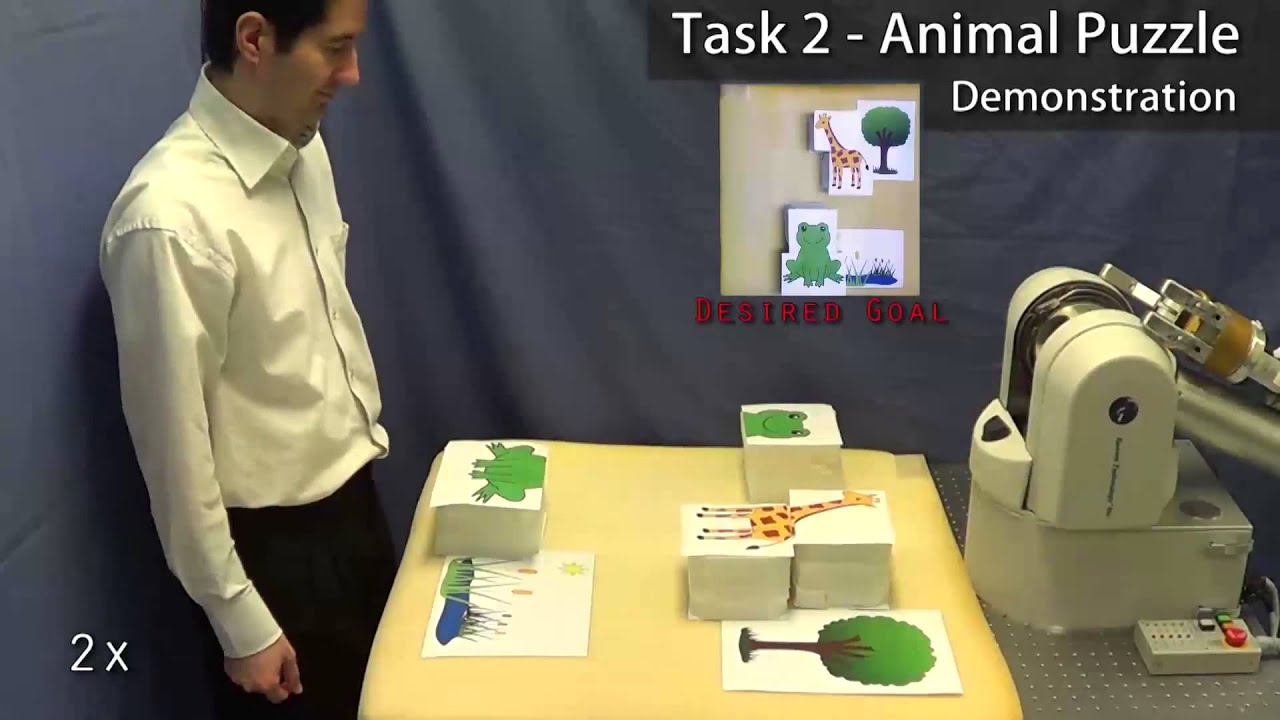
Visuospatial skill learning for robots
Robot Learns to Flip Pancakes

Humanoid robot learns to clean a whiteboard
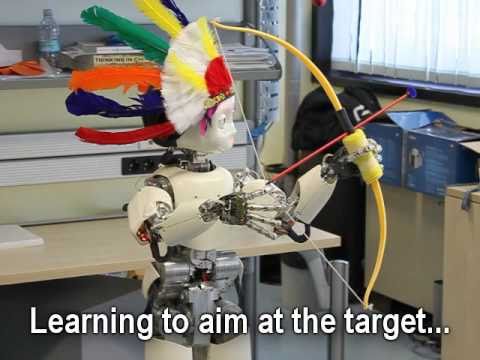
Robot learns the skill of archery
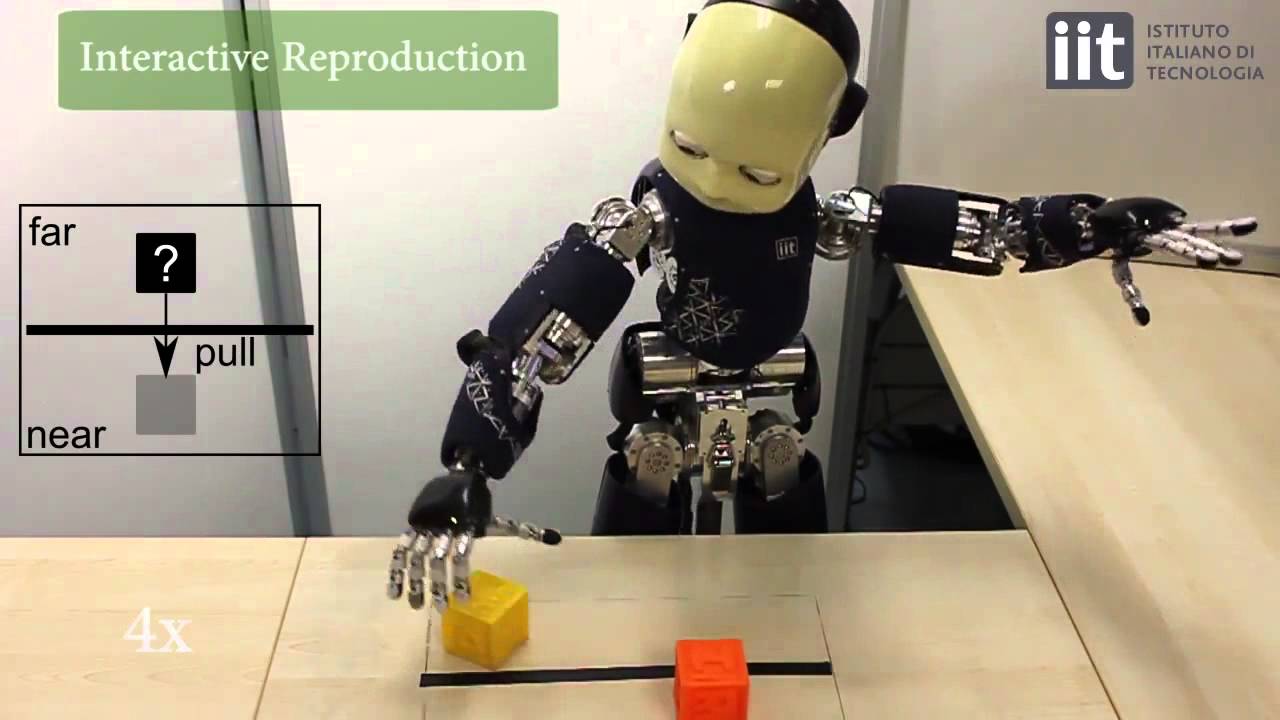
Learning Symbolic Representations of Actions from Human Demonstrations
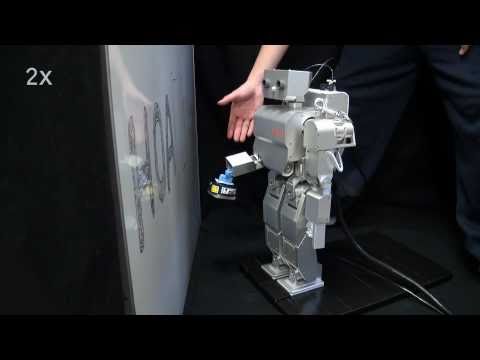
Robot WALK-MAN at DARPA Robotics Challenge

Publications
- Fabian Falck, Sagar Doshi, Marion Tormento, Gor Nersisyan, Nico Smuts, John Lingi, Kim Rants, Roni Permana Saputra, Ke Wang, Petar Kormushev, "Robot DE NIRO: A Human-Centered, Autonomous, Mobile Research Platform for Cognitively-Enhanced Manipulation", In Frontiers in Robotics and AI, 2020.
- Nemanja Rakicevic, Petar Kormushev, "Active Learning via Informed Search in Movement Parameter Space for Efficient Robot Task Learning and Transfer", In Autonomous Robots, Springer, 2019.
- Fabian Falck, Kawin Larppichet, Petar Kormushev, "DE VITO: A Dual-arm, High Degree-of-freedom, Lightweight, Inexpensive, Passive Upper-limb Exoskeleton for Robot Teleoperation", In Proc. 20th International Conference Towards Autonomous Robotic Systems (TAROS 2019), London, UK, 2019. (Best Paper Award)
- Fabian Falck, Sagar Doshi, Nico Smuts, John Lingi, Kim Rants, Petar Kormushev, "Human-centered manipulation and navigation with Robot DE NIRO", In IROS 2018 Workshop: Towards Robots that Exhibit Manipulation Intelligence, IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018.
- Nemanja Rakicevic, Petar Kormushev, "Efficient Robot Task Learning and Transfer via Informed Search in Movement Parameter Space", In NIPS 2017 Workshop on Acting and Interacting in the Real World: Challenges in Robot Learning, 31st Conference on Neural Information Processing Systems (NIPS), California, USA, 2017.

Contact us

