Nest building, 3D printing aerial robots developed by researchers
by Colin Smith
The nest building capability of the swiftlet is the inspiration for a new 3D printing aerial robot vehicle.
Swiftlets are tiny birds that build nests using their own saliva. In a world first, scientists from Imperial College London have developed a prototype 3D printing Micro Aerial Vehicle (MAV) that mimics the way that swiftlets build their nests.
Robots that mimic these birds could have enormous benefits, helping humans in construction and in hazardous situations
– Dr Mirko Kovac
Department of Aeronautics
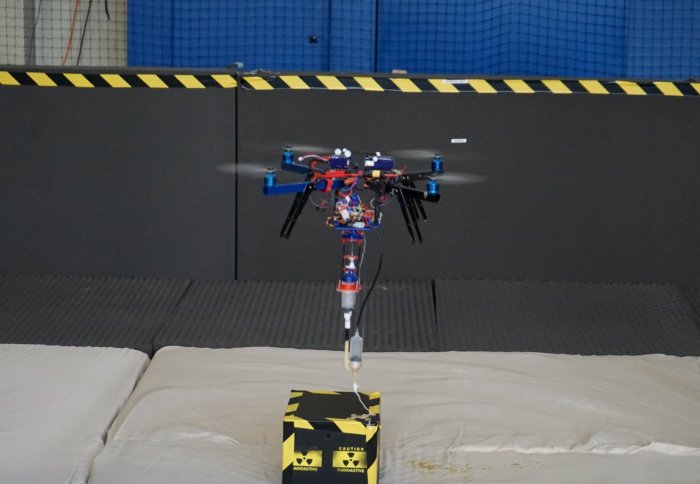
The MAV is a quad-copter, with four blades that enable it to fly and hover. It is made from off-the-shelf components, making it inexpensive to construct. It carries in its underbelly two chemicals that create polyurethane foam when mixed, and a printing module to deliver the foam. The foam can then be used to build simple structures or repair components.
Dr Mirko Kovac, from the Department of Aeronautics at Imperial, says: “Swiftlets are like beautiful flying factories that can navigate often treacherous, dark environments to find a suitable place to build nests. Amazingly, they carry inside of them all the materials they need to build their own home. We have taken these traits and adapted them in robotics. Robots that mimic these birds could have enormous benefits, helping humans in construction and in hazardous situations.”
The MAV could be used to carry out tasks in a range of environments that are hostile to humans. For example, they could inspect and repair industrial facilities such as offshore wind farms in remote and hard-to-reach locations.
The texture of the polymer exuded from the 3D printer also means that it can create ’grippers‘ to stick onto and transport objects to different locations. This means that the MAV could potentially be used to pick up and remove bombs, or to dispose of hazardous materials such as radioactive waste from crippled reactors, without exposing humans to danger.
Currently, the MAV can only fly in a controlled environment, using external sensors that feed information to a laptop. These process the information and send flight instructions back to the MAV via an on-board processor.
The next step for the team is to enable the vehicle to fly autonomously in any environment. They plan to incorporate high-speed cameras and sensors on board the MAV, which will act like a satellite navigation system for tracking and controlling of the flight trajectory.
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Colin Smith
Communications and Public Affairs