DE VITO wins Best Paper Award
by Sophie Sykes

DE VITO was officially revealed recently at the Great Exhibition Road Festival 2019 during which Imperial welcomed more than 45,000 visitors.
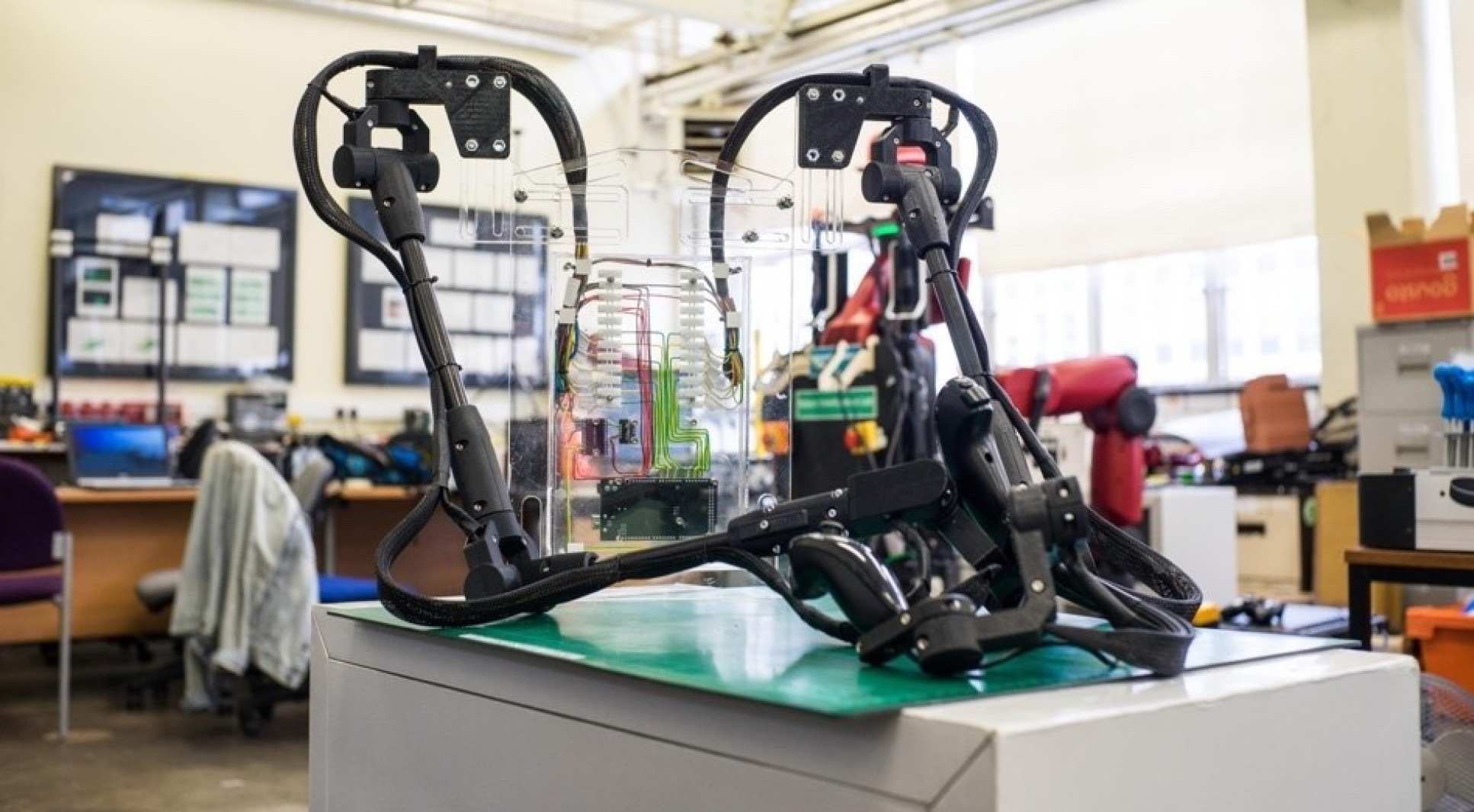
The Robot Intelligence Lab at the Dyson School of Design Engineering have designed and built a new exoskeleton called "DE VITO" (Design Engineering's Virtual Interface for Tele-Operation).
DE VITO was officially revealed recently at the Great Exhibition Road Festival 2019 during which Imperial welcomed more than 45,000 members of the public.
DE VITO is based on a dual-arm upper-limb exoskeleton with 14 degrees of freedom. The exoskeleton measures the pose of a human operator in order to control a robot through teleoperation. DE VITO has been designed and built from low-cost and low-power components to be extremely lightweight and portable. It can be used together with a virtual reality headset, hand controllers, and body tracking markers for a fully immersive experience. The Robot Intelligence Lab have been using the DE VITO exoskeleton to teleoperate their Robot DE NIRO.
A research paper about DE VITO has just won the Best Paper Award at the TAROS 2019 conference (20th Towards Autonomous Robotic Systems Conference) in London. The paper, authored by Robot Intelligence Lab members Fabian Falck and Kawin Larppichet, supervised by Dr Petar Kormushev, describes the design and implementation of the DE VITO exoskeleton.
The team behind DE VITO have open-sourced the hardware design and software implementation of DE VITO, for the benefit of the research community. Detailed information is available at: http://www.imperial.ac.uk/robot-intelligence/robots/de_vito/
 Paper reference:
Paper reference:
"Fabian Falck, Kawin Larppichet, and Petar Kormushev. DE VITO: A dual-arm, high degree-of-freedom, lightweight, inexpensive, passive upper-limb exoskeleton for robot teleoperation. Proc. 20th International Conference Towards Autonomous Robotic Systems (TAROS 2019). 2019."
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Sophie Sykes
Institute of Global Health Innovation