Frontiers of Medical Robotics: From Concept to Systems to Clinical Translation
The Hamlyn Centre research team outlines the development and a future look of robots for minimally invasive interventions.
Earlier diagnosis, improved efficiency, and delivery of therapeutic measures in combination with advances in surgical techniques have brought improved prognosis and functional outcome to patients, prolonging life and continuously extending the boundary of survival. As a result, the role of clinicians has undoubtedly become more demanding, requiring the handling of much multimodal, multidimensional, multiscale, interventional, metabolic, and system-level information beyond anatomical details.
Early diagnosis also means smaller target lesions, requiring not only minimally invasive access but also precision intervention that challenges the perceptual and sensory capabilities of the surgeons, in many cases requiring super human dexterity, vision, reasoning, and decision making. In this regard, medical robotics has a significant role to play in directing the future of surgery toward precision intervention and targeted therapy.
Medical robotics is poised to transform all aspects of medicine— from surgical intervention to targeted therapy, rehabilitation, and hospital automation. A key area is the development of robots for minimally invasive interventions.
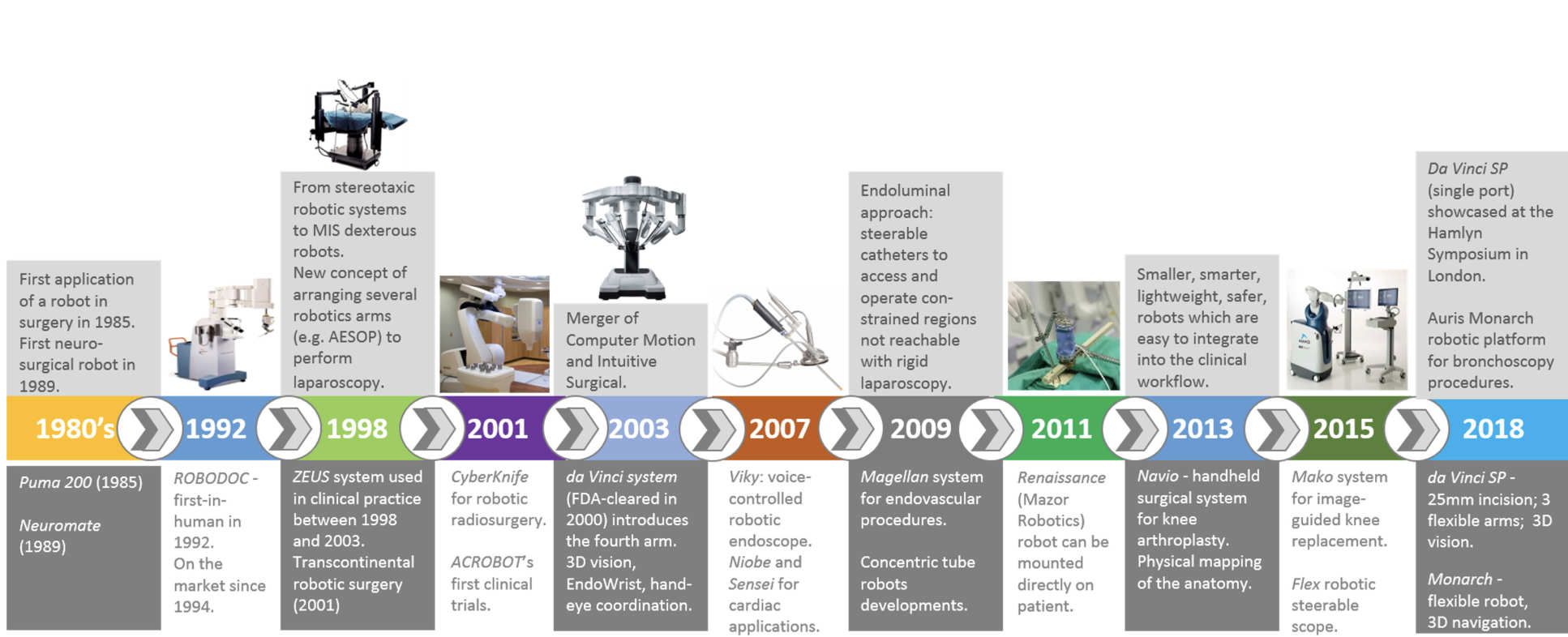
 This review provides a detailed analysis of the evolution of interventional robots and discusses how the integration of imaging, sensing, and robotics can influence the patient care pathway toward precision intervention and patient specific treatment. It outlines how closer coupling of perception, decision, and action can lead to enhanced dexterity, greater precision, and reduce dinvasiveness.
This review provides a detailed analysis of the evolution of interventional robots and discusses how the integration of imaging, sensing, and robotics can influence the patient care pathway toward precision intervention and patient specific treatment. It outlines how closer coupling of perception, decision, and action can lead to enhanced dexterity, greater precision, and reduce dinvasiveness.
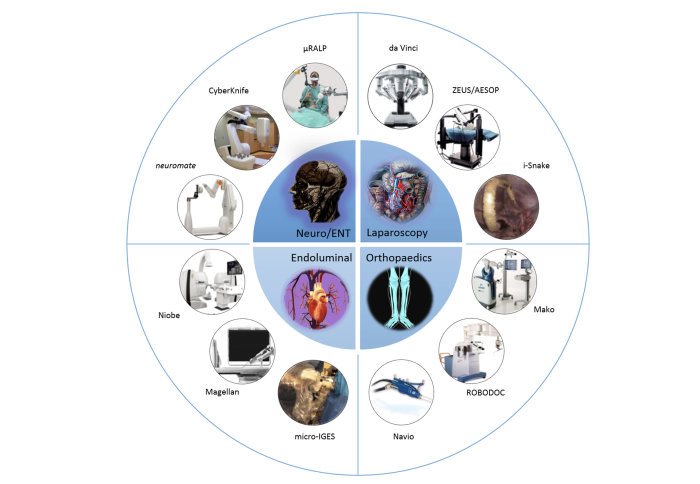
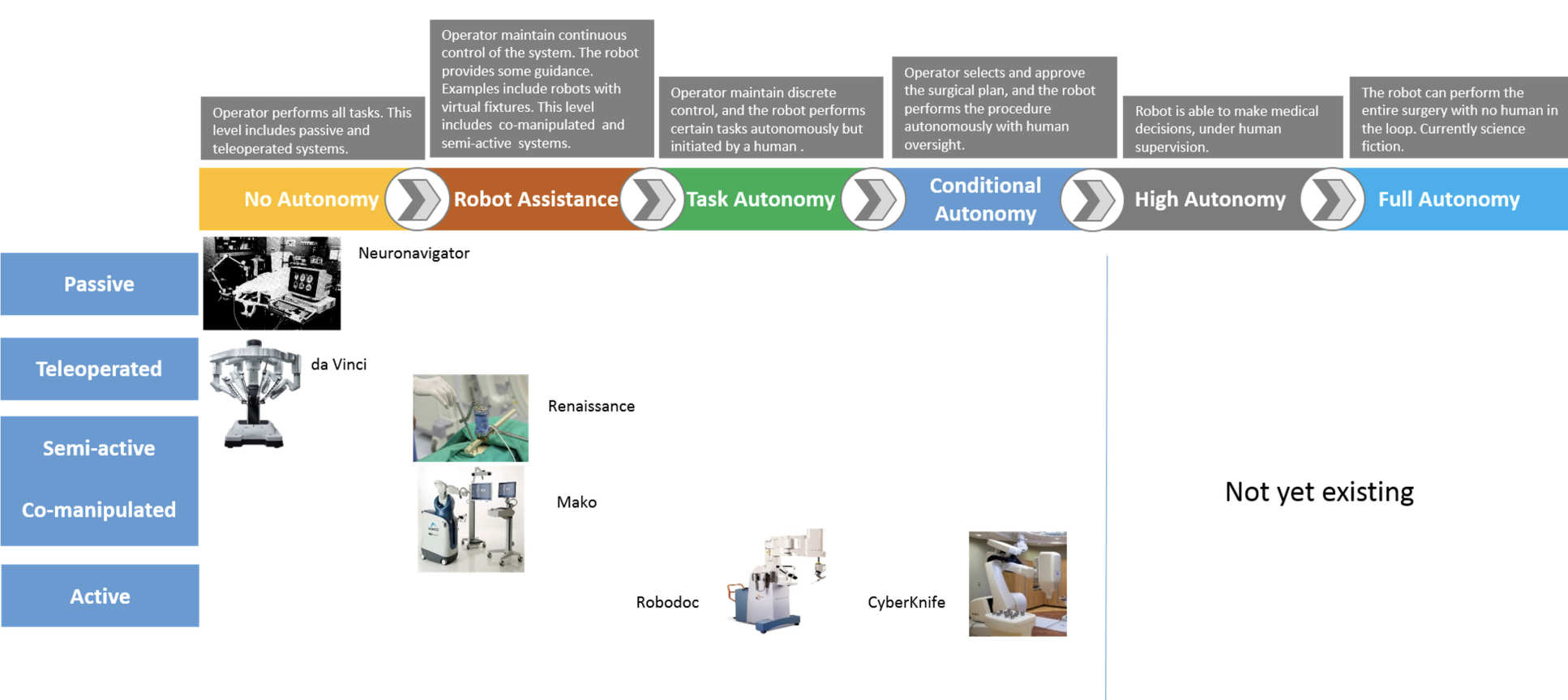
It provide sacritical analysis of some of the key interventional robot platforms developed over the years and the irrelative merit and intrinsic limitations. The review also presents a future outlook for robotic interventions and emerging trends inmaking the measiertouse, lightweight, ergonomic, and intelligent, and thus smarter, safer, and more accessible for clinical use.
Jocelyne Troccaz, Giulio Dagnino and Guang-Zhong Yang, 2019, Frontiers of Medical Robotics: From Concept to Systems to Clinical Translation, 21:193–218, The Annual Review of Biomedical Engineering.
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise