Showcasing robotics research from Imperial College
Real World Reinfocement Learning
Fundamental robotics research at Imperial College London is helping to drive the adoption of useful robots into our healthcare, cities and homes.
Showcasing robotics research from Imperial College at the top robotics conferences of 2020
Fundamental robotics research at Imperial College London is helping to drive the adoption of useful robots into our healthcare, cities and homes. 2020 has so far seen 17 papers from the labs that make up the?Imperial Robotics Forum?accepted into the top robotics conferences IROS and RSS.
IEEE International Conference on Intelligent Robots and Systems 2020 (IROS)
Department of Aeronautical Engineering
TiltDrone: a Fully-Actuated Tilting Quad-Rotor Platform. Peter Zheng, XinKai Tan, Ba?aran Bahad?r Koçer, Erdeng Yang, Mirko Kovac – Aerial Robotics Lab
MEDUSA: a Multi-Environment Dual-robot for Underwater Sample
Acquisition. Diego Debruyn, Raphael Zufferey, Sophie Franziska Armanini, Crystal
Winston, Andre Farinha, Yufei Jin, Mirko Kovac – Aerial Robotics Lab
Aerial Sensor Placement for Cluttered Environments. Andre Farinha, Raphael Zufferey, Sophie Franziska Armanini, Peter Zheng, Mirko Kovac – Aerial Robotics Lab
Department of Computing
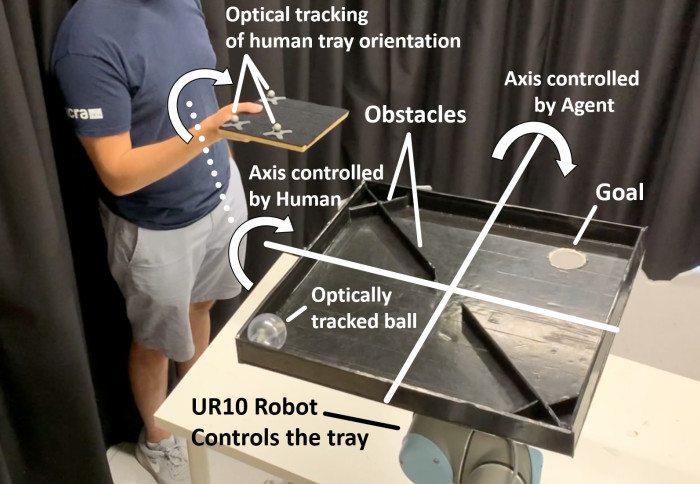
Real-World Human-Robot Collaborative Reinforcement Learning. Ali Shafti, Jonas Tjomsland, William Dudley, A. Aldo Faisal - Brain and Behaviour Lab, paper video.
Crossing the Gap: A Deep Dive into Zero-Shot Sim-to-Real Transfer for Dynamics. Eugene Valassakis, Zihan Ding, Edward Johns – Robot Learning Lab
Physics-Based Dexterous Manipulations with Estimated Hand Poses and Residual Reinforcement Learning. Guillermo Garcia-Hernando, Edward Johns, Tae-Kyun Kim – Computer Vision & Learning Lab and Robot Learning Lab
BIT-VO: Visual Odometry at 300 FPS using Binary Features from the Focal Plane. Riku Murai, Sajad Saeedi, Paul H. J. Kelly – Software Performance Optimisation Group
Dyson School of Design Engineering
On the False Positives and False Negatives of the Jacobian Matrix in Kinematically Redundant Parallel Mechanisms. Nicolas Baron, Andrew Philippides, Nicolas Rojas - REDS Lab. See the video here!
Design and Control of SLIDER: An Ultra-lightweight, Knee-less, Low-cost Bipedal Walking Robot. Ke Wang, David Michael Marsh, Roni Permana Saputra, Digby Chappell, Zhonghe Jiang, Bethany Kon, Petar Kormushev – Robot Intelligence Lab
Model Predictive Control for a Tendon-Driven Surgical Robot with Safety Constraints in Kinematics and Dynamics. Francesco Cursi, Valerio Modugno, Petar Kormushev – Robot Intelligence Lab
Department of Electrical and Electronic Engineering
Augmented Reality User Interface for Heterogeneous Multirobot Control, Rodrigo Chacon & Yiannis Demiris - Personal Robotics Lab
Department of Mechanical Engineering
Optimal pose estimation method for a multi-segment, programmable bevel-tip steerable needle. Alberto Favaro, Riccardo Secoli, Ferdinando Rodriguez y Baena, and Elena De Momi – Mechatronics in Medicine Lab
A novel sensing method to detect tissue boundaries during robotic needle insertion based on laser Doppler flowmetry. Vani Virdyawan, Orsina Dessi, and Ferdinando Rodriguez y Baena – Mechatronics in Medicine Lab
Imperial Academics are also organising the following workshops at IROS 2020
Robot-Assisted Training for Primary Care – Organised by Dr Thrishantha Nanayakkara, Morph Lab
Robotics: Science and Systems 2020 (RSS)
Department of Computing
Aerial Manipulation Using Hybrid Force and Position NMPC Applied to Aerial Writing. Dimos Tzoumanikas, Felix Graule, Qingyue Yan, Dhruv Shah, Marija Popovic, Stefan Leutenegger - Smart Robotics Lab. See the video here!
Dyson School of Design Engineering
The RUTH Gripper: Systematic Object-Invariant Prehensile In-Hand Manipulation via Reconfigurable Underactuation. Qiujie Lu, Nicholas Baron, Angus Clark, Nicolas Rojas – REDS Lab See the video here!
Imperial Academics are also organising the following workshops at RSS 2020
Closing the Academia to Real-World Gap in Service Robotics – Co-organised by Dr Petar Kormushev, Robot Intelligence Lab
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Eloise Matheson
Department of Mechanical Engineering