A novel gaze‑controlled flexible robotised endoscope: preliminary trial & report
A Hamlyn-led project proposed a novel gaze‑controlled flexible robotised endoscope system, aiming to assist interventional endoluminal therapy.
Interventional endoluminal therapy is rapidly advancing as a minimally invasive surgical technique. The expanding remit of endoscopic therapy necessitates precision control.
Although several emerging endoscopic approaches have been proposed to facilitate advanced therapeutic procedures, many of these platforms require several operators (including an endoscopist to control the endoscope) and assistants in the operating theatre or endoscopy room.
This situation may increase cognitive load and distraction for the operator while performing a highly skilled and challenging technique.
Eye tracking, on the other hand, is an emerging technology which allows intuitive control of devices. Within surgical specialties, visual gaze pattern analysis has been informative for assessing the cognitive burden associated with complex procedures.
This emerging technology may potentially be helpful for assisting the surgical process in control systems, as well as reducing the cognitive burden and distraction for the endoscopic operators.
A novel gaze-controlled flexible robotised endoscope
 In the light of this, our research team at the Hamlyn Centre proposed a novel gaze-controlled flexible robotised endoscope system, aiming to assist interventional endoluminal therapy.
In the light of this, our research team at the Hamlyn Centre proposed a novel gaze-controlled flexible robotised endoscope system, aiming to assist interventional endoluminal therapy.
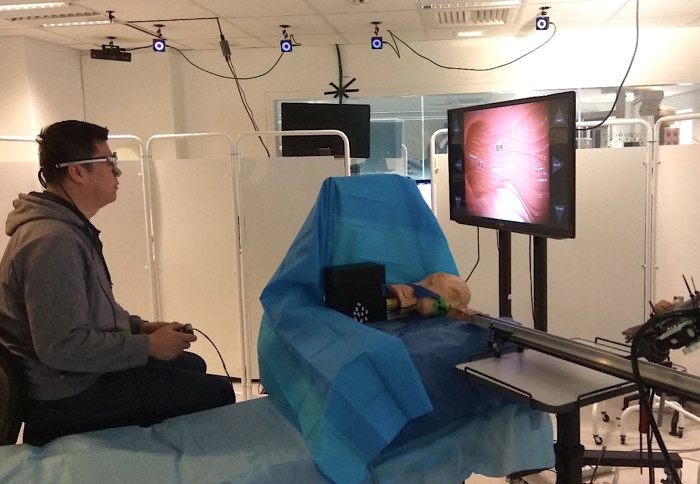
An eye gaze-control system consisting of eye tracking glasses, specialist cameras and a joystick was used to control a robotically driven endoscope allowing steering, advancement, withdrawal and retroflexion.

Eight experienced and eight non-endoscopists used both the eye gaze system and a conventional endoscope to identify ten targets in two simulated environments: a sphere and an upper gastrointestinal (UGI) model.
In addition, completion of tasks was timed. Subjective feedback was collected from each participant on task load (NASA Task Load Index) and acceptance of technology (Van der Laan scale).
The research results showed that the novel eye gaze-control system was significantly quicker to use and subjectively lower in workload when used by non-endoscopists. The eye gaze-control system thus appears feasible as an intuitive endoscope control system.

Our researchers further pointed out that hybrid gaze and hand control may prove a beneficial technology to evolving endoscopic platforms.
With further progress gaze-control may allow intuitive control of the endoscopic field of view and allow the operator to handle endoscopic tools without the need for multiple assistants.
This therefore could reduce cognitive burden and distraction resulting in improved resections and procedural outcomes in complex therapeutic procedures.
This research was supported by the NIHR Imperial Biomedical Research Centre (BRC) (Arun Sivananthan, Alexandros Kogkas, Ben Glover, Ara Darzi, George Mylonas and Nisha Patel, "A novel gaze?controlled flexible robotized endoscope: preliminary trial and report", Surgical Endoscopy, May 2021).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise