Three Papers Accepted at GECCO 2021
Three papers coming from researchers of the AIRL Lab and Robot Intelligence Lab have been accepted to GECCO 2021.
We are delighted to share that three papers from members of our lab as well as the Robot Intelligence Lab, have been accepted at GECCO 2021with one paper being nominated for the Best Paper Award in the Neuro-evolution track!
The following papers have been accepted:
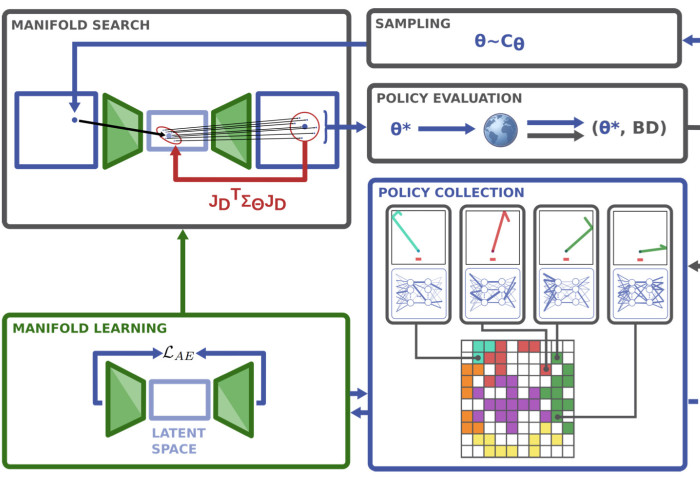
Policy Manifold Search: Exploring the Manifold Hypothesis for Diversity-based Neuroevolution by Nemanja Rakicevic, Antoine Cully, and Petar Kormushev [website][paper]
Summary: Policy Manifold Search is an approach to performing diversity-based policy search, which leverages the concept of the manifold hypothesis, in the context of the policy network parameter space.
Policy Gradient Assisted MAP-Elites by Olle Nilsson and Antoine Cully (Nominated for Best Paper Award!) [website][paper]
Summary: Policy Gradient Assisted MAP-Elites (PGA-MAP-Elites) is a novel algorithm that enables MAP-Elites to efficiently evolve large neural network controllers by introducing a gradient-based variation operator inspired by Deep Reinforcement Learning.
Multi-Emitter MAP-Elites: Improving quality, diversity and data efficiency with heterogeneous sets of emitters by Antoine Cully [paper]
Summary: ME-MAP-Elites leverages the diversity of a heterogeneous set of emitters, in which each emitter type is designed to improve differently the optimisation process. Moreover, a bandit algorithm is used to dynamically find the best emitter set depending on the current situation.
Congrats to all the authors for these great publications!
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Maxime Allard
Department of Computing