Robber flies combine multiple nav systems to avoid obstacles and catch prey
by Jacklin Kwan
Using high-speed cameras, researchers have revealed how robber flies balance between avoiding obstacles while chasing down their prey.
The good things about the obstacle avoidance that insects do, amongst many other flying animals, is that it’s all done by vision Dr Samuel Fabian Lead author
The findings show that these small predatory insects actually combine two navigation systems to steer themselves mid-flight.
The researchers believe that their work may one day inspire the future design of miniature aerial drones, which also face the challenge of moving towards a target while avoiding obstacles.
Graceful predators
Robber flies (Holcocephala fusca) are small in size – usually no bigger than a five pence coin – and they have similarly small brains. Yet, they manage to fly gracefully through the air to catch their prey without slamming proboscis-first into barriers, making these mini assassins the perfect subject for scientists to understand how small species make the best out of their limited number of neurons and visual inputs to hunt at high speeds.
 “The real demonstration of flight is that insects don’t have many neurons to begin with, at least compared to your average vertebrate, and are relatively computationally limited,” said lead author Dr Samuel Fabian from the Department of Bioengineering.
“The real demonstration of flight is that insects don’t have many neurons to begin with, at least compared to your average vertebrate, and are relatively computationally limited,” said lead author Dr Samuel Fabian from the Department of Bioengineering.
“We’re interested in how insects push the maximum.”
Navigation and avoidance systems
Robber flies are given the task of intercepting their prey while avoiding obstacles, but because of their limited brain size, it’s likely these insects follow simple rules to steer their flight, rather than relying on the complex calculations that mammalian brains are capable of.
“The reaction speed of these flies is an order of magnitude faster than ours,” Dr Fabian says – showing how the simple brains of robber flies can often be a boon to their high-speed flight manoeuvring.
In a new study published in the Journal of Experimental Biology, Imperial College London teamed up with researchers from the University of Minnesota to find that robber flies use their visual inputs and a combination of two simple control systems to steer their flight.
One system is called ‘pure-proportional navigation’, often used by homing missiles. If we imagine a line connecting the robber fly’s eyes to their prey, called their line of sight, changes in the robber fly’s speed and the direction of their flight is determined by how their line of sight changes. If a target veers to the left or right, the robber fly would correct their trajectory proportionally in response without needing to plan in advance for it, relying solely on their sight.
The second system is a simple avoidance algorithm to ensure that the fly does not collide with obstacles. If an obstacle is coming towards the robber fly, growing larger in their field of view, the robber fly veers away from it. The bigger the obstacle grows in their vision, the more the robber fly turns away to avoid it.
By combining these two simple navigation systems, the robber fly is able to hunt prey while deftly weaving around obstacles.
High speed cameras and 3D simulation – about the study
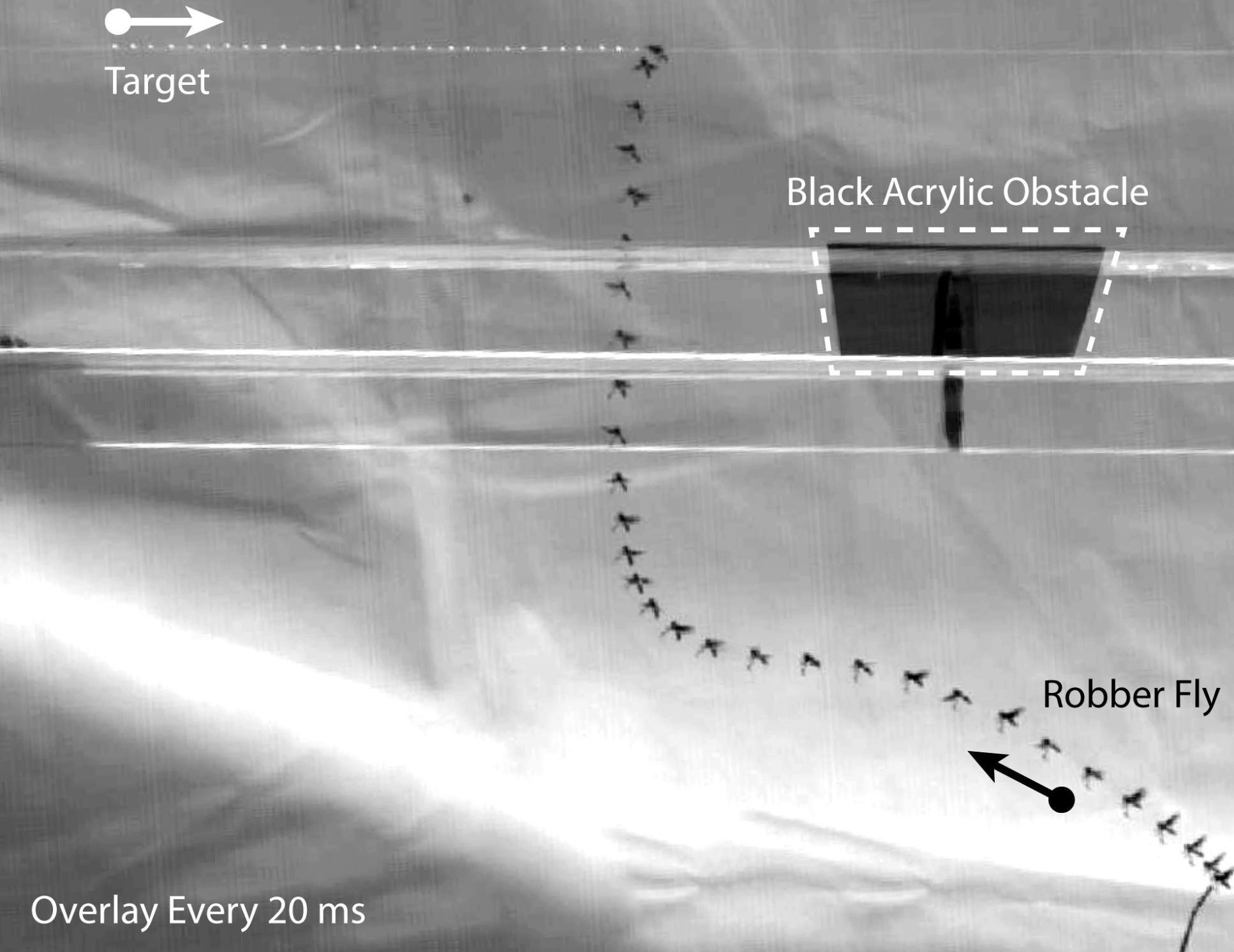
In the experiment, robber flies were made to catch a small moving target of only 1.3 millimetres long, travelling across a thin cord. The researchers also introduced an obstacle in the form of a black acetate bar that sometimes obscured the moving target, or blocked the robber fly’s flight path.
The researchers recorded their experiment with high-speed cameras, which were synced to take videos concurrently. Researchers were able to reconstruct the robber fly’s flight in 3D, and then tested different models through simulation by comparing their behaviour to the paths the real flies took.
Inspiring next-gen robots
Dr Fabian states that understanding how small species make decisions mid-flight can inspire the design light robotic aerial drones.
Robotic systems, unlike animals, struggle to balance two competing goals – such as navigating around obstacles while moving towards a target. Often, robotic systems will use sensors that utilise the reflection of lasers or sound waves to understand the obstacles around them. However, such sensors can be too heavy for aerial drones.
“The good things about the obstacle avoidance that insects do, amongst many other flying animals, is that it’s all done by vision,” Dr Fabian said.
The next steps for the researchers will be to branch out to other steering systems, and to understand better the kind of sensory information that insects have access to and use to fly through the air. By comparing how different flying animals make such decisions, we can then understand how evolution has shaped animal flight systems.
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Jacklin Kwan
Faculty of Natural Sciences