GlobDesOpt: A Global Optimisation Framework for Optimal Robot Manipulator Design
Our Hamlyn researchers proposed a new global optimisation framework for optimal robot manipulator design, aiming to aid minimally invasive surgery.
In minimally invasive surgery (MIS), having accurate kinematic robotic models is essential for effective control of surgical robots. This is because there are very few (or even no) sensors that can be used to compensate for the modelling errors, and surgical environments are rarely structured, due to organs being very soft and deformable, and unpredictable.
Good robotic design should ensure effective performance regardless of the required task. However, properly designing robots is a time-consuming and challenging task.
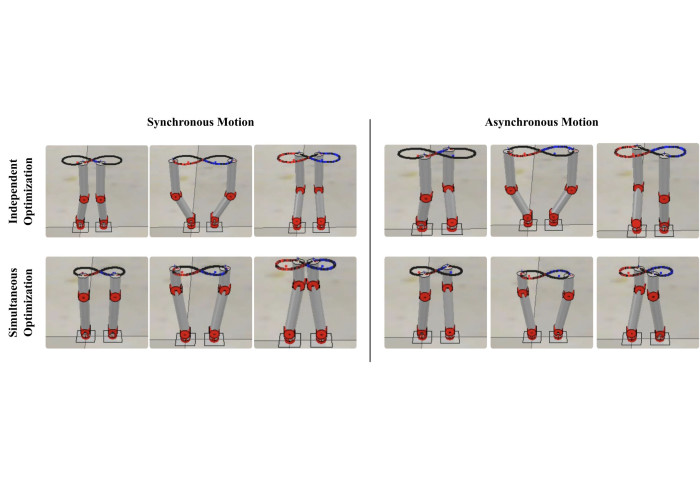
One main reason is that surgical robots are generally used in a dual-arm configuration. These two arms are often employed and controlled simultaneously. It is therefore very important to design a robotic system which is capable of achieving higher dexterity and flexibility, while keeping the dimensions of motions small.
However, it is very challenging (or even impossible) for researchers to formulate an optimisation function analytically with consideration of different types of parameters and constraints, especially for highly complex robotic structures.
Black-box optimisation approaches are therefore seen as more preferable methods as they do not require a close form of the optimisation function, nor knowledge about its derivatives.
GlobDesOpt: A Global Optimisation Framework for Optimal Robot Manipulator Design
Our research team from the Hamlyn Centre and the Dyson School of Design Engineering developed a global optimisation framework, GlobDesOpt, for optimal robot manipulator design.

It is a versatile and flexible Matlab package, which is very simple to use and is an open-source optimisation framework for optimal robot design.
In this work, our researchers compared the optimisation results across three different global optimisation solvers: Bayesian Optimisation (BO), Genetic Algorithm (GA) and Particle Swarm Optimisation (PSO).
Lead researcher, Dr Francesco Cursi said: "GlobDesOpt allows selection of different design parameters, easy implementation of cost functions and models for different robotic structures."

Moreover, our research team proposed two optimisation strategies which can be applied to both single and dual-arm robots. The dual-arm optimisation includes the dual-arm dexterity measure and a safety measure to maximise the dual-arm robot’s dexterity while reducing the risk of collisions between the two arms.
"Currently GlobDesOpt focuses only on articulated robots and serial-link robotic structures. However, the packages provide the users with large flexibility as different robotic models can be integrated. Moreover, the user is also left with the choice of different solvers to use, so as to more appropriately customise the use to their needs and have a larger choice of optimal solutions." Dr Francesco Cursi emphasised.
- Open-Source: GlobDesOpt framework
This research was supported by EPSRC Programme Grant “Micro-robotics for Surgery (EP/P012779/1)” (Francesco Cursi, George P. Mylonas and Petar Kormushev, "GlobDesOpt: A Global Optimisation Framework for Optimal Robot Manipulator Design", IEEE Access, 10, 5012 - 5023, January 2022).
Article supporters
Article text (excluding photos or graphics) © Imperial College London.
Photos and graphics subject to third party copyright used with permission or © Imperial College London.
Reporter
Erh-Ya (Asa) Tsui
Enterprise