
Multifunctional Fibre Robot - Miniaturisation of arbitrary geometries via fibre drawing
To reach the small ductal systems and deliver targeted therapy in MIS, the final generation of the nested continuum robot needs to be small, flexible and fully articulated. To provide optical, electrical and chemical interfaces with the target simultaneously, the development of multi-material polymer fibres provides unique opportunities.
Our team proposed a new approach towards polymer-based fibre drawing technology, which enables one to create fibres having various geometries and functions.
The fibre manufacturing process starts with a macroscopic structure called the preform, with a cross-section which is a scaled-up replica of that intended for the fibre. The preforms are usually centimetres (cm) in diameter and tens of cm in length so it can be easily manufactured using various techniques.
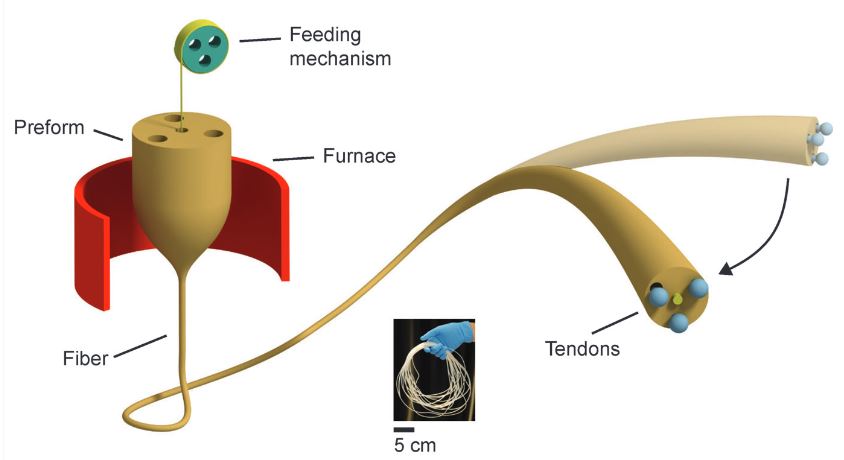 The preform is heated, softened and pulled into hundreds of metres or kilometres of fibre in a fibre draw tower. By going through this process, our research team is able to generate an outer diameter ranging from mm down to hundreds of microns, scaling down and miniaturising the structures to the desired size and design.
The preform is heated, softened and pulled into hundreds of metres or kilometres of fibre in a fibre draw tower. By going through this process, our research team is able to generate an outer diameter ranging from mm down to hundreds of microns, scaling down and miniaturising the structures to the desired size and design.
A fibre robot can be realised within a couple of mm in cross section with necessary functions to perform a surgery at the distal end of a fibre (fibre tip) via a combination of processes:
- co-drawing low temperature amorphous materials (polymers, chalcogenide glasses) that constitute the preform
- co-feeding filaments (metal wires, glass fibres) during drawing
- post-draw the addition of fibre like (or even commercialised) tools into designated channels
 Scalability is another advantage of fibre drawing technology that will help the adaptation of these fibre robots to surgery. Through the adapted process of drawing fibre robots, our research team can produce hundreds of metres of functional fibre robots, which can be cut into desired lengths for various surgical purposes. The cost of the overall process as well as the materials (mostly standard or low cost and biocompatible plastics and metals) results in an insignificant cost per device.
Scalability is another advantage of fibre drawing technology that will help the adaptation of these fibre robots to surgery. Through the adapted process of drawing fibre robots, our research team can produce hundreds of metres of functional fibre robots, which can be cut into desired lengths for various surgical purposes. The cost of the overall process as well as the materials (mostly standard or low cost and biocompatible plastics and metals) results in an insignificant cost per device.
Our research team is working on applying multifunctional fibre robots to a variety of medical applications, such as fabrication of catheters for MR guided endovascular interventions, and for developing Atrial Fibrillation mapping technology; a high precision fibrebot for delivery of diagnostic (mass spectrometry and probe based confocal endomicroscopy) and therapeutic (CO2 laser) surgical instruments, targeting instantaneous intraoperative histological mapping and treatment, some of which has been demonstrated in vivo in porcine models and in a cadaver study.
Fibre Actuation - Fibrebots - Robotic fibres for high-precision minimally invasive surgery
- Burak Temelkuran, Mohamed E.M.K Abdelaziz, Guang-Zhong Yang, Anzhu Gao, "A Method and Preform for Forming a Device Comprising a Shape Memory Polymer" - Publication No: US-20220168946-A1 (Published 02.06.2022, Licensed by Precision Robotics UK).
- Burak Temelkuran, Mohamed E.M.K Abdelaziz, Guang-Zhong Yang, Anzhu Gao, "Longitudinally non-uniform preform and method of making the same" - Publication No: US-20220170181-A1 (Published 02.06.2022, Licensed by Precision Robotics UK)
- Andreas Leber, Chaoqun Dong, Stella Laperrousaz, Hritwick Banerjee, Mohamed E. M. K. Abdelaziz, Nicola Bartolomei, Bastien Schyrr, Burak Temelkuran and Fabien Sorin, "Highly Integrated Multi-Material Fibers for Soft Robotics", Advanced Science, 10 (2), November 2022. [*News]
- Mohamed Essam Mohamed Kassem Abdelaziz, Jinshi Zhao, Bruno M Gil Rosa, Hyun-Taek Lee, Daniel Simon, Khushi Vyas, Bing Li, Hanifa J A Koguna, Yue Li, Ali Anil Demircali, Huseyin Uvet, Gulsum Gencoglan, Arzu Akcay, Mohamed Elriedy, James M Kinross, Ranan Dasgupta, Zoltan Takats, Eric Yeatman, Guang-Zhong Yang, Burak Temelkuran, "Fiberbots: Robotic fibers for high-precision minimally invasive surgery", BioRixv, pre-print, February 2023.
Theme 1 Highlights
Case Studies
Case 1 - Multifunctional Fibre Robot - Miniaturisation of arbitrary geometries via fibre drawing [Read More]
- Dr Temelkuran, Dr Abdelaziz and Mr Zhao
Case 2 - Medical Biosensing - a multiplexed GFET measurement system [Read More]
- Dr Rosa and Dr Anastasova
Research Outcomes
To know more about our Research Outcomes (Key Findings, Research Databases and Models, Research Tools and Methods, Collaboration, Software and Technical Products, Intellectual Property and Engagement Activities), please visit UKRI - Micro-Robotics for Surgery (EP/P012779/1) website.
Programme Grant Theme 1, 2, 3








Contact Us
The Hamlyn Centre
Bessemer Building
South Kensington Campus
Imperial College
London, SW7 2AZ
Map location